

Multi-unmanned aerial vehicle four-dimensional track collaborative planning method and system
A multi-UAV, track planning technology, applied in general control system, control/adjustment system, three-dimensional position/course control, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0026] The technical solutions of the present invention will be clearly and completely described below in conjunction with the accompanying drawings. Apparently, the described embodiments are some of the embodiments of the present invention, but not all of them. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the protection scope of the present invention.
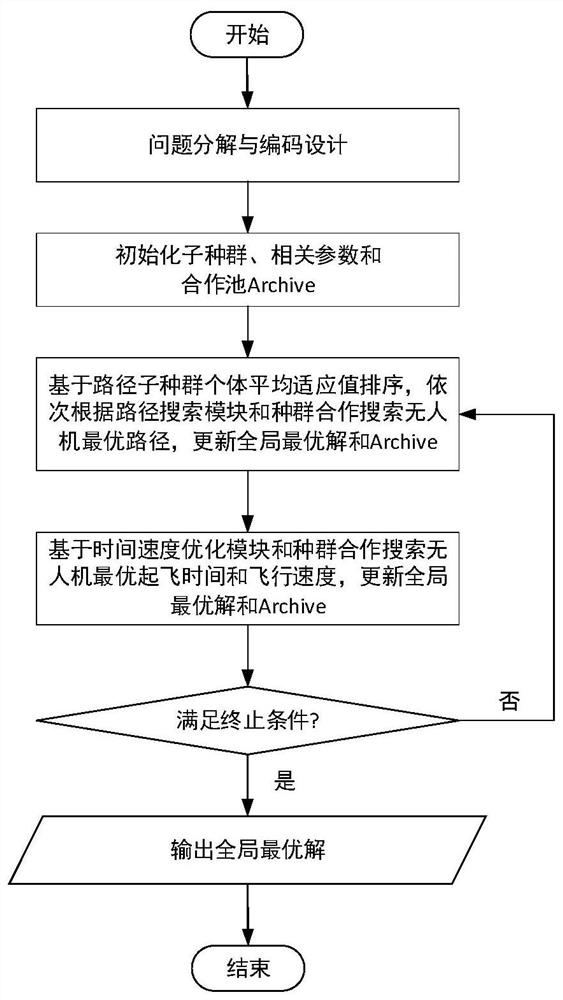
[0027] Figure 1 to Figure 6 A specific embodiment of a multi-UAV four-dimensional trajectory collaborative planning method of the present invention is shown, as Figure 6 shown, including the following steps:
[0028] Step 1: Given the UAV's three-dimensional mission space and mission time range, the take-off location and destination point of multiple UAVs, and the flight time constraint information;
[0029] Step 2: discretize the 3D task space into 3D cuboid grids of equal size, and number the 3D cuboid g...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More