

Modeling and control method of elastic plane constrained slender soft-bodied robot
A technology of plane constraint and control method, applied in instruments, special data processing applications, electrical and digital data processing, etc. impact, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0048] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be described in detail below in conjunction with the accompanying drawings and specific embodiments.
[0049] The present invention applies to elongated soft robots (which are prior art) whose length to cross-sectional diameter ratio is greater than 100.
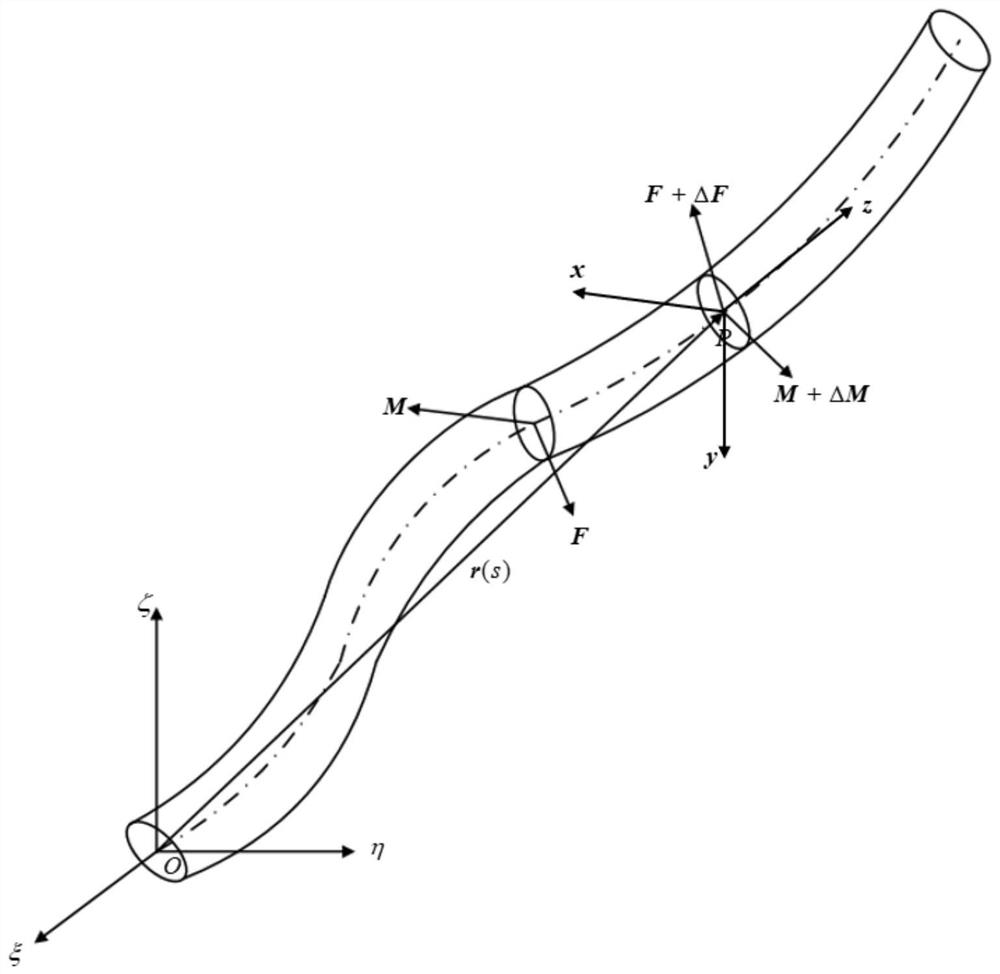
[0050] Such as figure 1As shown, the slender soft robot is idealized as an ultra-long elastic thin rod with a rigid circular section, and the space curve formed by passing through the center of the section is called the center line of the slender soft robot. Now the basic assumptions of the robot model are given:
[0051] (1) The cross-section of the robot is equal, orthogonal to the centerline, and its geometric diameter is much smaller than the overall length of the robot and the radius of curvature of the centerline, and the shear deformation under the influence of bending is not considered. ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More