

Industrial robot step-by-step calibration system and method
An industrial robot and calibration system technology, applied in the field of industrial robot step-by-step calibration system and robot calibration, can solve the problem that the accurate position of the robot base coordinate system cannot be calibrated, the robot base coordinate system cannot be accurately calibrated, and it is difficult to ensure the reliability of the calibration results. and other problems, to achieve the effect of large measurement range, reduced accuracy requirements, and convenient operation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0087]The invention will be further described in further detail with the accompanying drawings, and the following examples are intended to facilitate the understanding of the present invention, and will not be defined.
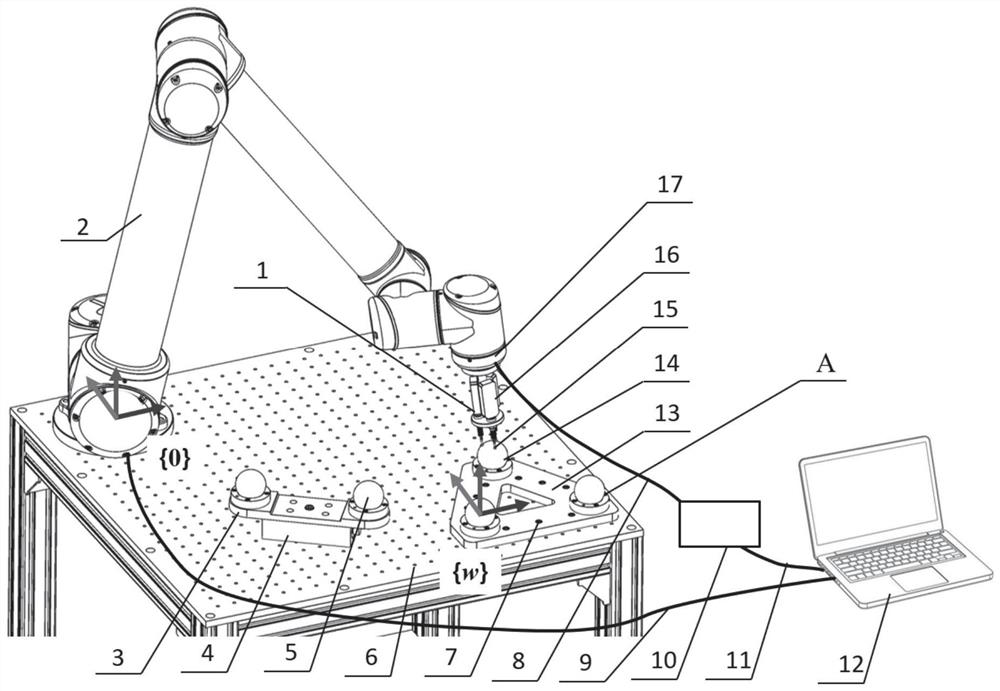
[0088]One aspect of the embodiment of the present invention provides an industrial robot step-by-step calibration system, which can be foundFigure 1A-Figure 1B As shown, it includes a movable double ball device 3, a fixed three-tension device 7, a terminal measuring device 1, a computer 12, a counter 10, and the like.
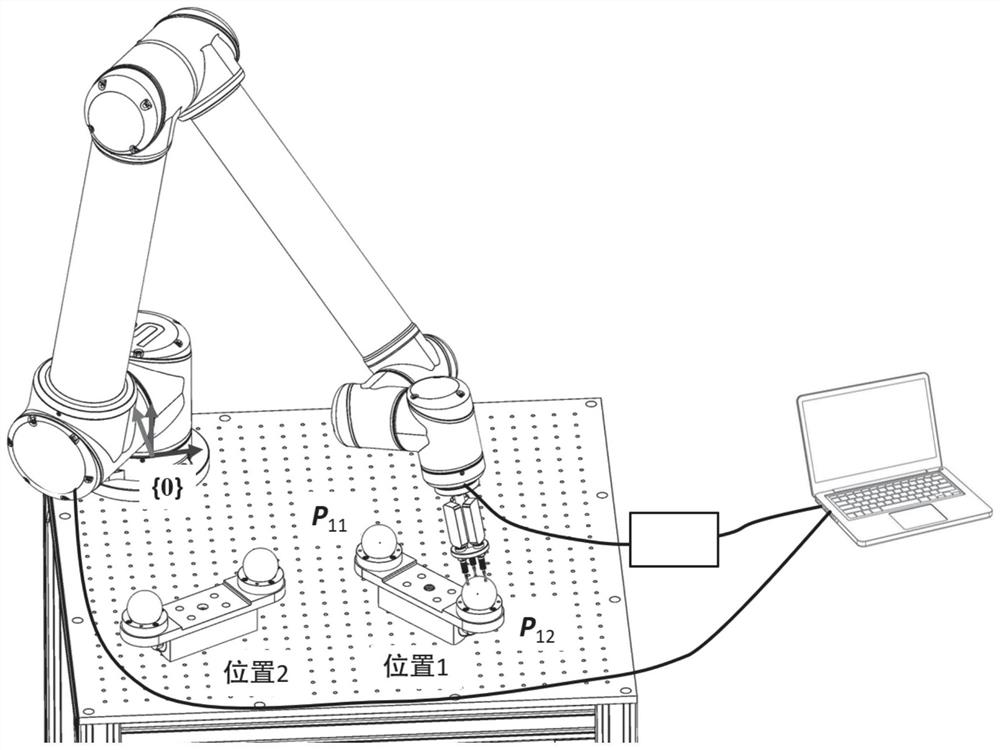
[0089]Further, the duplex apparatus 3, the three club device 7, and the base of the robot 2 are provided on the table of a table 6. Further, the double ball device 3 can be moved relative to the robot 2 base and is locked in any designated position within the robot 2 operating space, and the three-tension device 7 is relatively fixed with the robot 2 base.
[0090]Further, the double ball device 3 can be mounted on the table 6 of the magnetic stand 4, which i...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More