

Attitude adjustment method, controller, system and robot for substation legged robot
An adjustment method and robot technology, applied in the field of robots, can solve the problems of inaccurate stop position, low sensor positioning accuracy, large error, etc., and achieve the effect of improving stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0056] This embodiment provides a method for adjusting the posture of a footed robot in a substation, including:
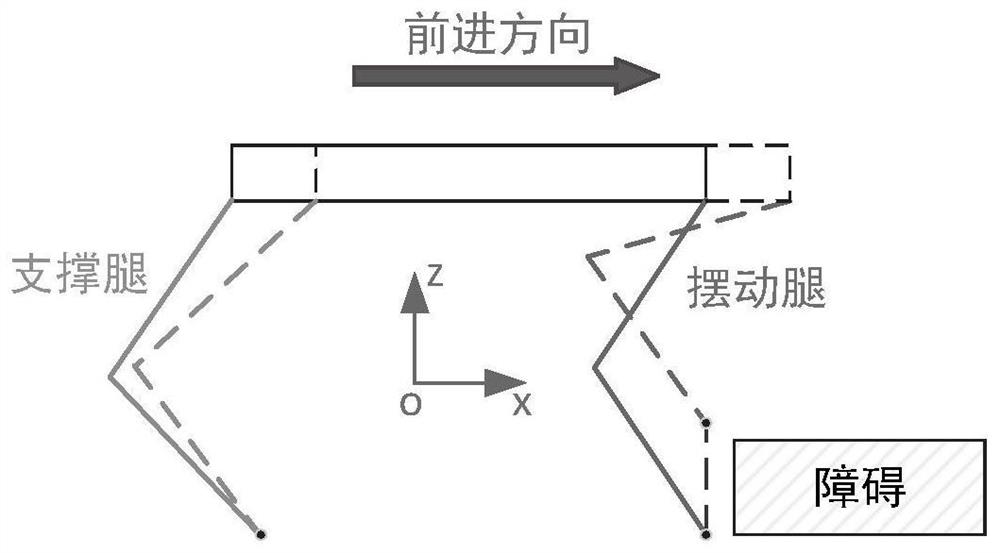
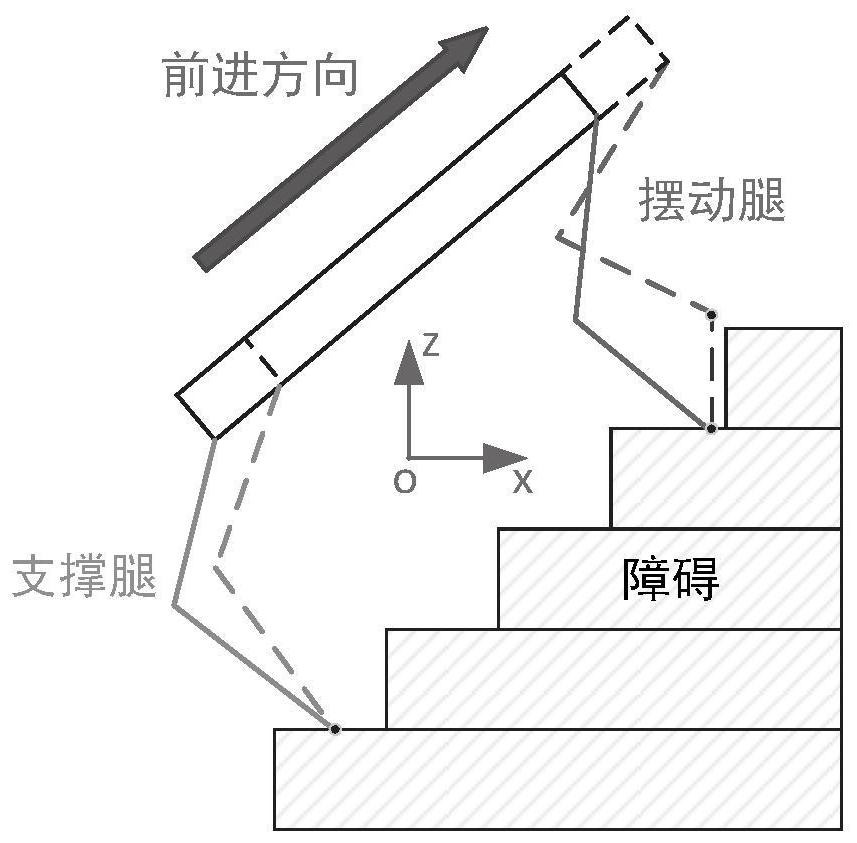
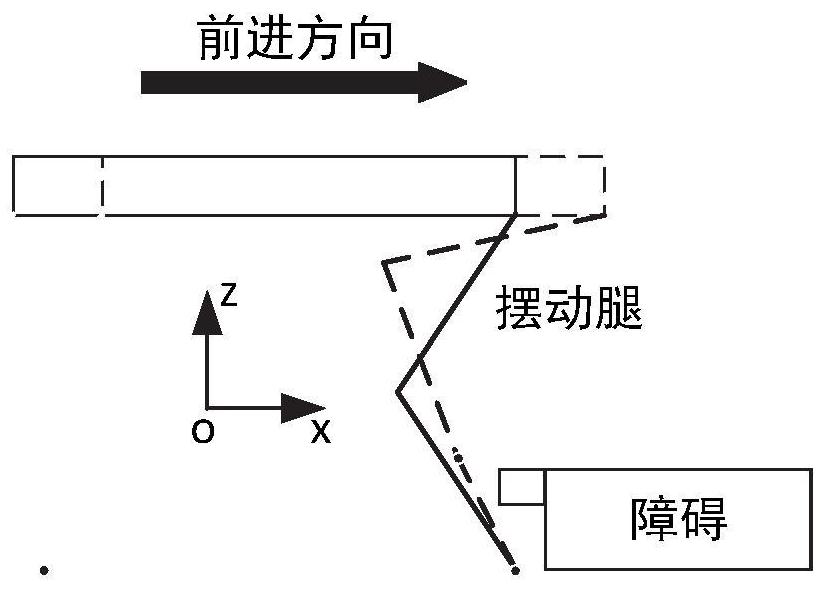
[0057] When the legged robot is moving forward, use the same speed retreat method to make the moving speed of the swinging leg relative to the torso the same as that of the supporting leg relative to the torso, so as to ensure that the swinging leg is lifted vertically;
[0058] After the footed robot stands stably, the initial coordinates of the foot in the shoulder joint coordinate system are calculated based on the posture information and geometric information of the stable standing, and combined with the adjustment of the trunk posture and the distance between the left and right feet, the distance between the foot and the shoulder is obtained. New coordinates in the joint coordinate system and adjustment of standing posture;
[0059] In the process of moving forward and standing posture adjustment of the legged robot, based on the current motion conditions and...
Embodiment 2
[0123] This embodiment provides a controller, which includes a computer-readable storage medium, and a computer program is stored on the computer-readable storage medium. When the program is executed by a processor, the inspection of the substation as described in the first embodiment above is implemented. Steps in a method for stability-augmenting control of a robot.
Embodiment 3
[0125] This embodiment provides a posture adjustment system for a legged robot in a substation, which includes the controller described in the second embodiment above.
[0126] What needs to be explained here is that other structures of the substation legged robot attitude adjustment system can be realized by using the existing structure, which will not be described in detail here.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More