

Multi-mode bionic wall-climbing robot simulating longhorned grasshopper motion form
A wall-climbing robot and multi-mode technology, applied in the field of robotics, can solve the problems of lack of rapid jump transition ability on the wall, poor wall adaptability, single attachment method, etc., and achieve the effect of improving the space wall adaptability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0031] The present invention is described in further detail now in conjunction with accompanying drawing. These drawings are all simplified schematic diagrams, which only illustrate the basic structure of the present invention in a schematic manner, so they only show the configurations related to the present invention.
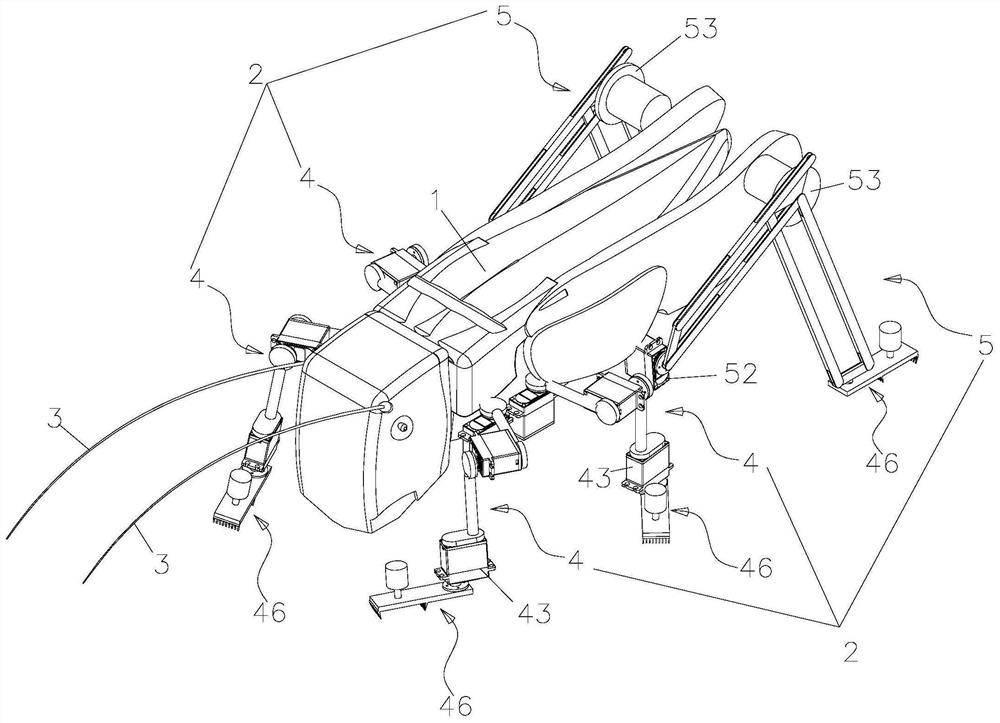
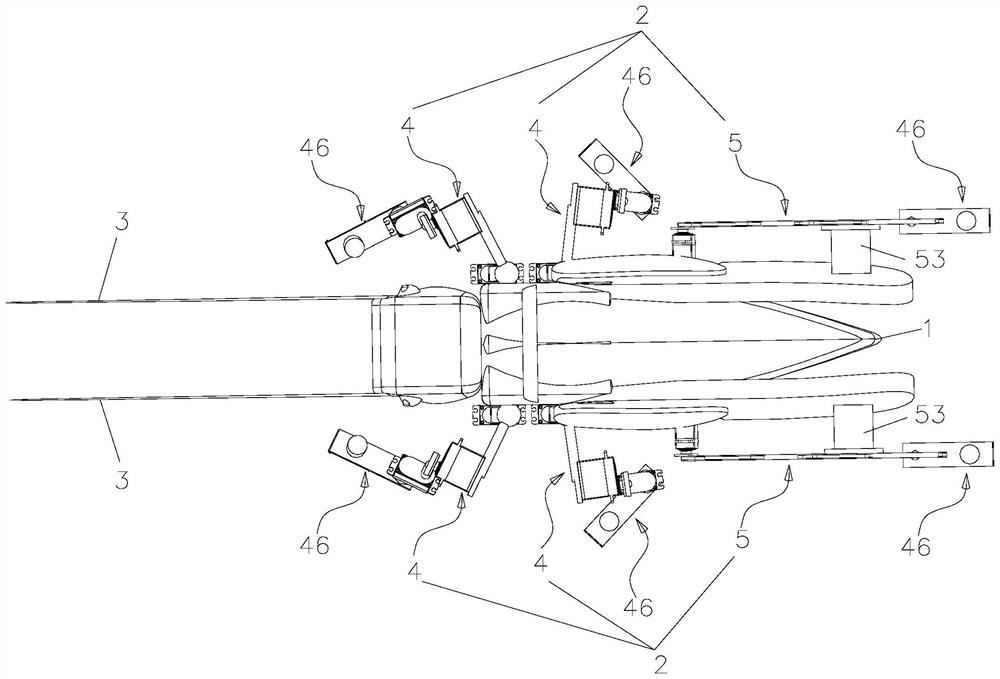
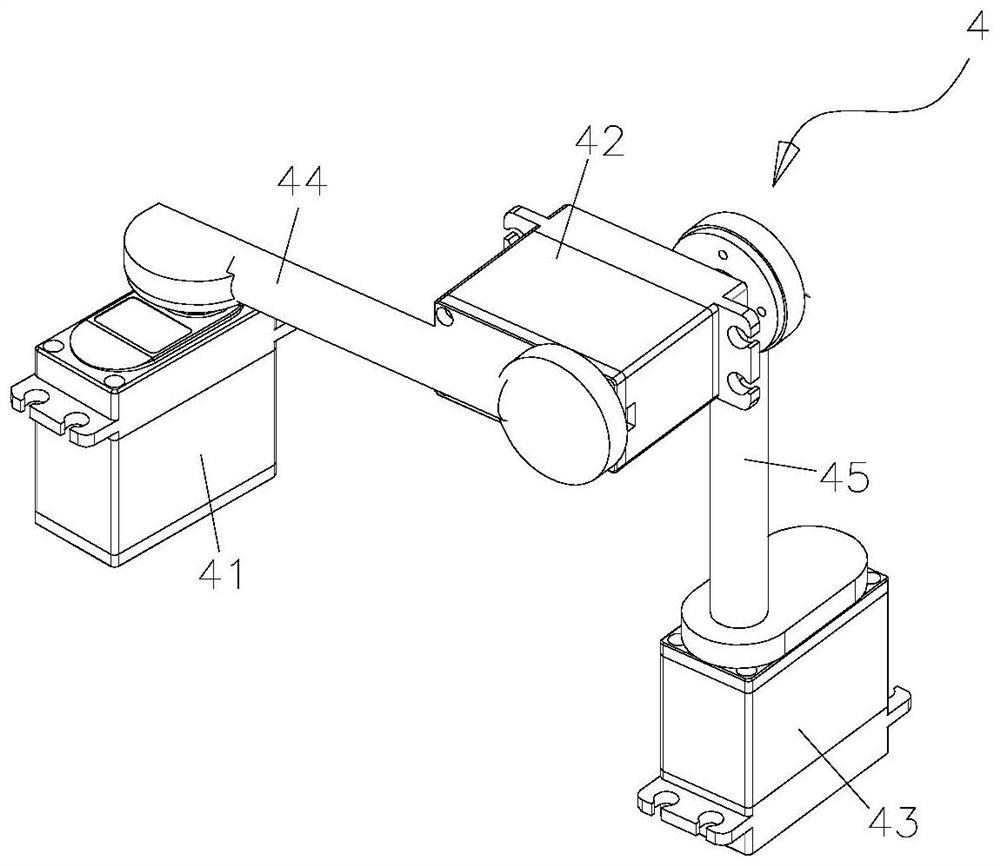
[0032] Such as Figure 1-6As shown, a multi-mode bionic wall-climbing robot imitating the movement form of katydids, the lower part of the trunk body 1 is provided with a number of foot drive mechanisms 2, and the foot drive mechanism 2 is provided with foot ends that are in contact with the wall. Attachment mechanism 46, the trunk body 1 is provided with a wireless receiver 3, which receives signals through the wireless receiver 3 and controls several foot drive mechanisms 2 on the trunk body 1 to interact with each other, and at the same time controls the foot end to cooperate with the attachment mechanism 46 to contact with the wall surface Or disengage, s...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More