

Humanoid robot and two-degree-of-freedom modular humanoid robot joint thereof
A humanoid robot and modular technology, which is applied in the field of humanoid robots, can solve the problems of large moment of inertia of the mechanism, easy access to the center of gravity of the structure, and small work space, so as to achieve large joint movement space, reduce the moment of inertia, and realize structural autonomy. lock effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
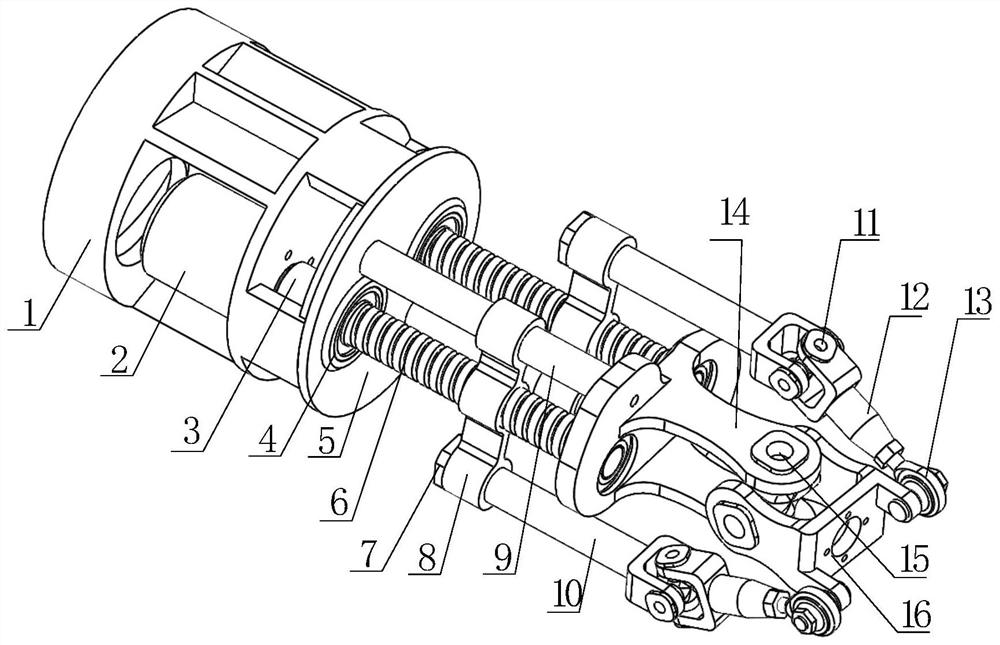
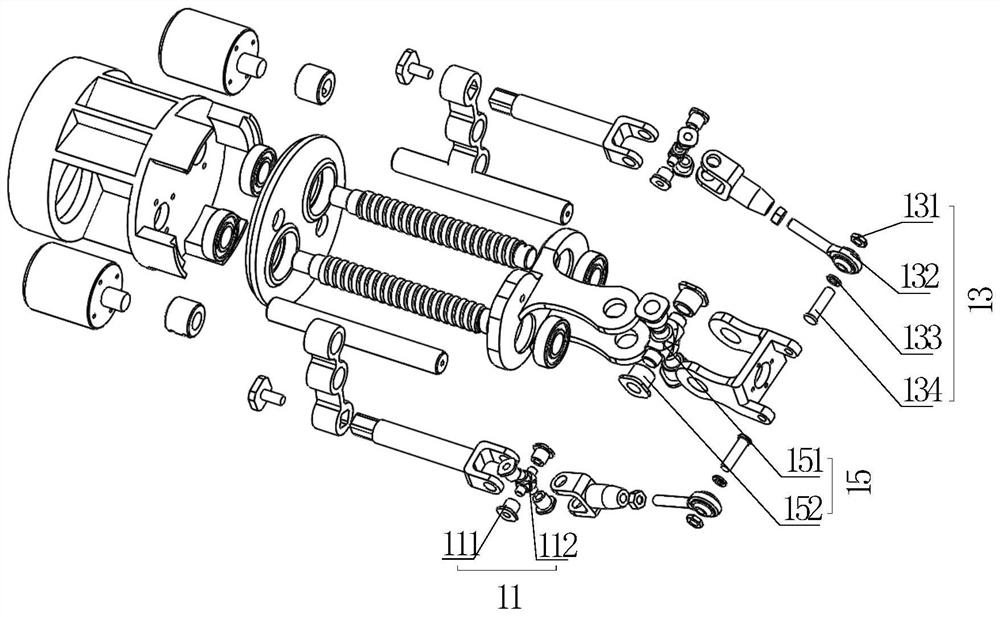
[0028] Such as figure 1 As shown, a two-degree-of-freedom modular humanoid robot joint includes two sets of identical drive and transmission mechanisms, and each set of drive and transmission mechanisms consists of a motor 2, a coupling 3, a lead screw 6, a locking screw 7, and a slider 8. Connecting rod one 10, cross shaft assembly one 11, connecting rod two 12, joint bearing assembly 13 and screw bearing 4 form. Each group of driving and transmission mechanisms is fixedly installed on the structural frame composed of motor frame 1, guide rod 9 and end support frame 14; the moving ends of the two groups of driving and transmission mechanisms are connected to the execution end of U-shaped frame 16 to drive together U-shaped frame 16 moves.
[0029] Such as figure 1 As shown, the motor 2 is fixedly installed inside the motor frame 1, the motor shaft is connected to the lead screw 6 through the coupling 3, the lead screw 6 is supported by the lead screw bearings 4 at both ends...
Embodiment 2
[0041] A humanoid robot, including the two-degree-of-freedom modular humanoid robot joint in Embodiment 1, its structure and working process have been described in detail in Embodiment 1, and will not be repeated here.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More