

Robot remote fixed point control method for human eye subretinal injection
A fixed-point control and retinal technology, applied in the field of robotic arm control, can solve the problems of improving the precision and operation difficulty of retinal injection, and the difficulty of retinal injection operation, so as to achieve the effect of improving safety, overcoming precision limitations, and reducing difficulty
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
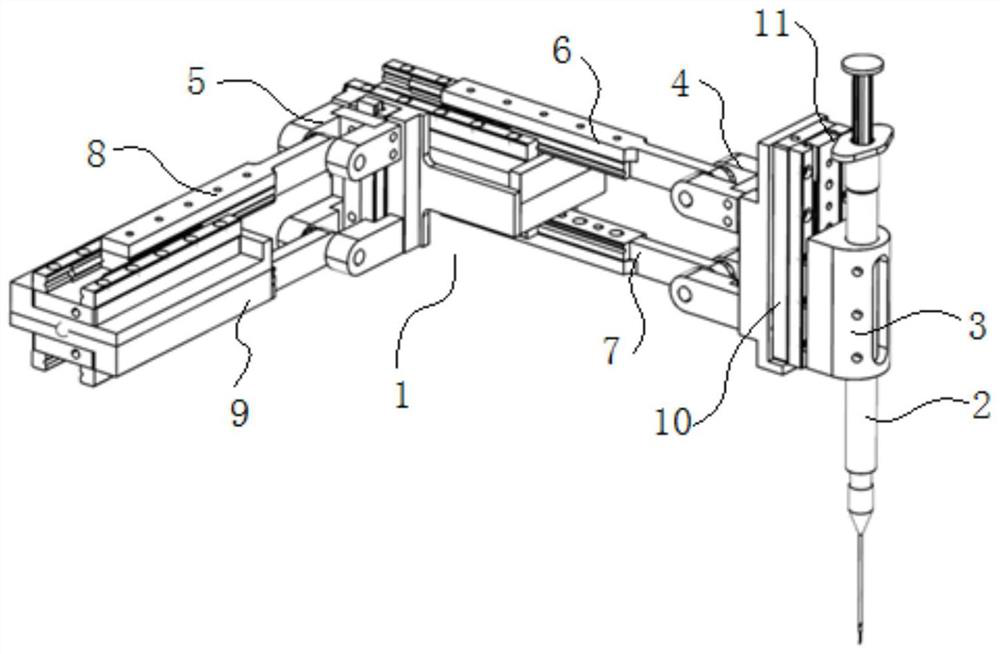
[0045] Such as Figure 1-2 Shown is an embodiment of a robot remote fixed-point control method for subretinal injection of human eyes, including a robotic arm 1 and a syringe 2 mounted on the robotic arm 1, and the robotic arm 1 includes a clamping device 3 for clamping the syringe 2 and a drive arm that drives the clamping device 3 to swing; the drive arm includes a first joint 4 and a second joint 5 connected to the first joint 4, the first joint 4 drives the clamping device 3 to swing, and the second joint 5 drives the first joint 4 swing; the first joint 4 includes a first linear motor 6 and a second linear motor 7; the second joint 5 includes a third linear motor 8 and a fourth linear motor 9; the clamping device 3 is provided with a first linear motor that drives the syringe 2 to move linearly Five linear motors 10 and the sixth linear motor 11 that drives the syringe 2 piston motion; comprise the following steps:
[0046] Step 1: Observe the eye image through the micro...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More