

Method and device for scanning surface topography according to shape profile
A surface topography and contour technology, applied in the field of 3D scanning, can solve the problems of affecting scanning efficiency, scanning accuracy, unacceptable time cost, and large environmental factors, so as to avoid errors, improve efficiency, and avoid scanning errors.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0041] A device according to the present invention is provided, including: a robot arm, a three-dimensional scanning device, and a computer;
[0042] The robot arm is connected to the three-dimensional scanning device and controls the position direction and moving speed of the three-dimensional scanning device by the robot;
[0043] The robot is controlled by the computer to control the three-dimensional scanning device in spatial motion, allowing the three-dimensional scanning device to completely scan all three-dimensional point cloud data on the surface of the workpiece.
[0044] Specifically, the computer includes: a workpiece CAD data analysis system and a path automation system;
[0045] The workpiece CAD data analysis system is introduced into the CAD data of the workpiece, and the imported workpiece CAD data is analyzed, and the contour data of the workpiece is extracted, generate a uniform distributed coordinate point array;
[0046] The path automatic generation system g...
Embodiment 2
[0065] Example 2 is a modification of Example 1
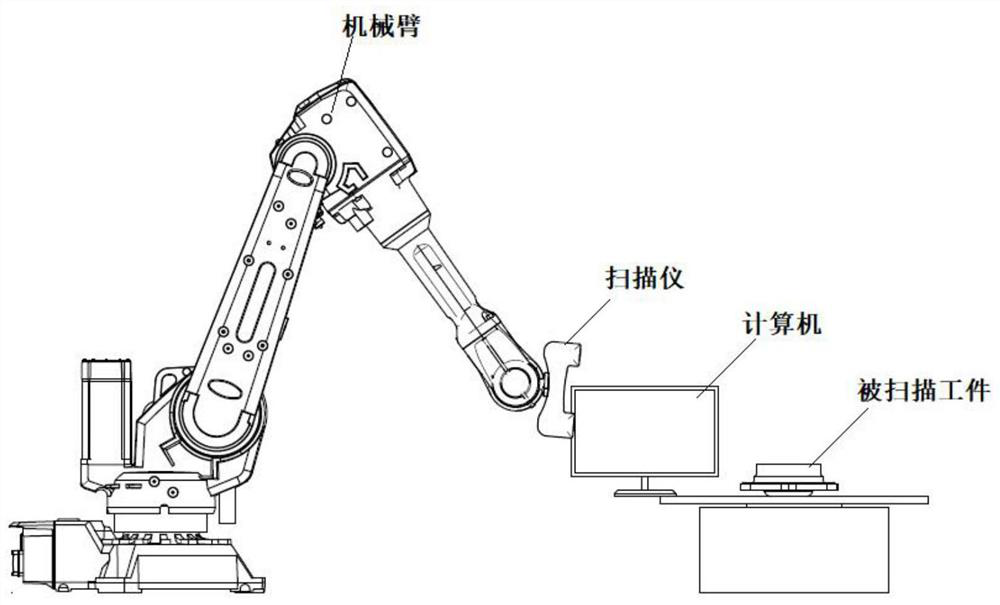
[0066] figure 1 A device for tracking a three-dimensional scan is tracked based on an optical tracking measurement technique based on an optical tracking measurement technique without having to obtain a complete three-dimensional dot cloud data on the surface of the workpiece on the surface of the object surface. Using the computer automatic calculation path to achieve the purpose of automatic precision scanning.
[0067] Specifically, the scanning device includes: 1 robot arm, 2 three-dimensional scanner, 3 computer, wherein 2 three-dimensional scanner and 1 robot arm is fixed, and the mechanical arm is controlled by the three-dimensional scanner moving position and moving speed, the robot arm is subject to the computer The control of the program.
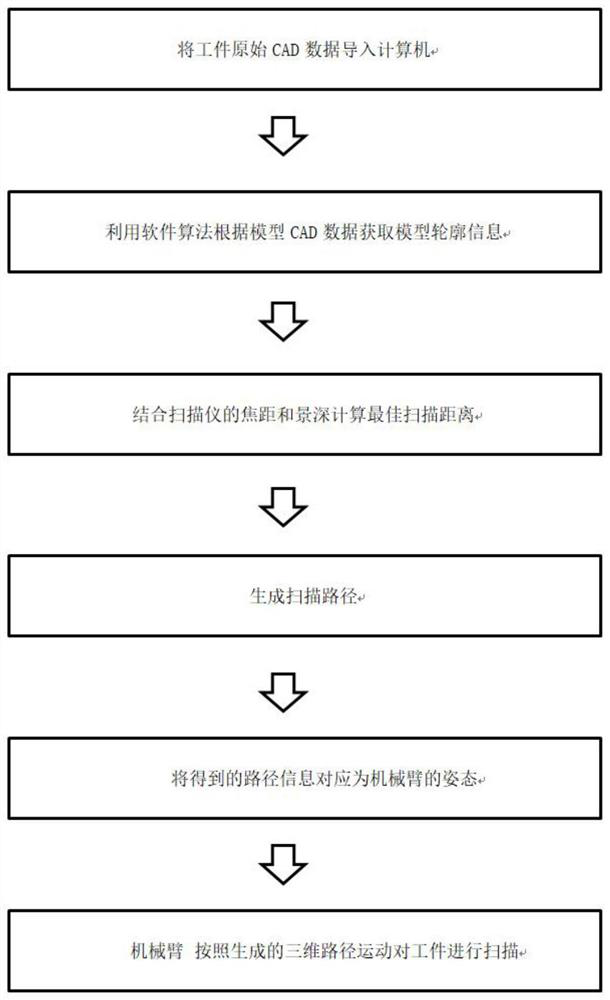
[0068] The present invention provides a method of having a differential profile to scan surface morphology, such as figure 2 Distance
[0069] Step 1: Import the workpiece original CA...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More