

Safety Nursing Control Method Based on Multi-sensing Food-Assisting Robot Assisted Eating
A robot-assisted and control method technology, applied in the direction of sensors, program-controlled manipulators, manipulators, etc., can solve problems such as the integration and integration of difficult medical treatment and rehabilitation nursing, time-consuming recovery and accident investigation, and inability to take safety protection measures.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0029] The present invention will be further described in detail below in conjunction with the accompanying drawings and specific embodiments.
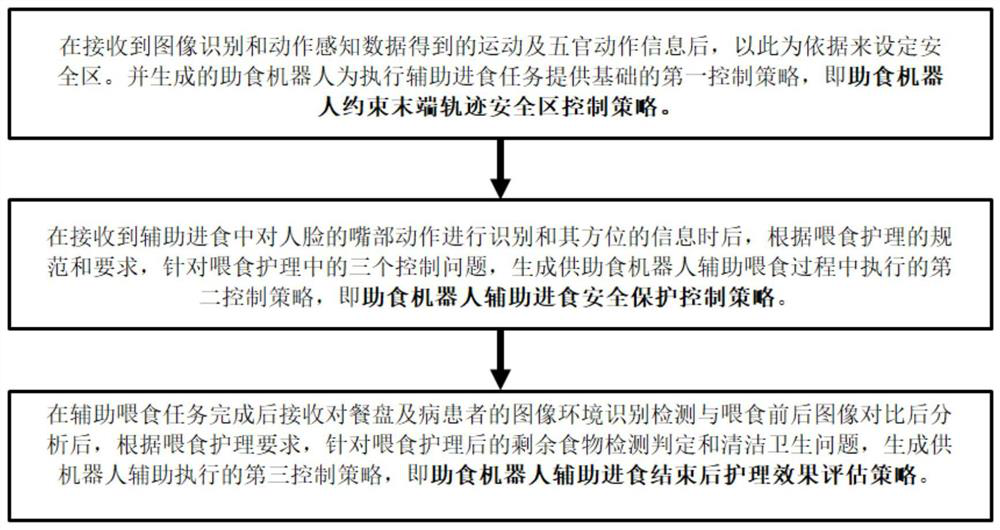
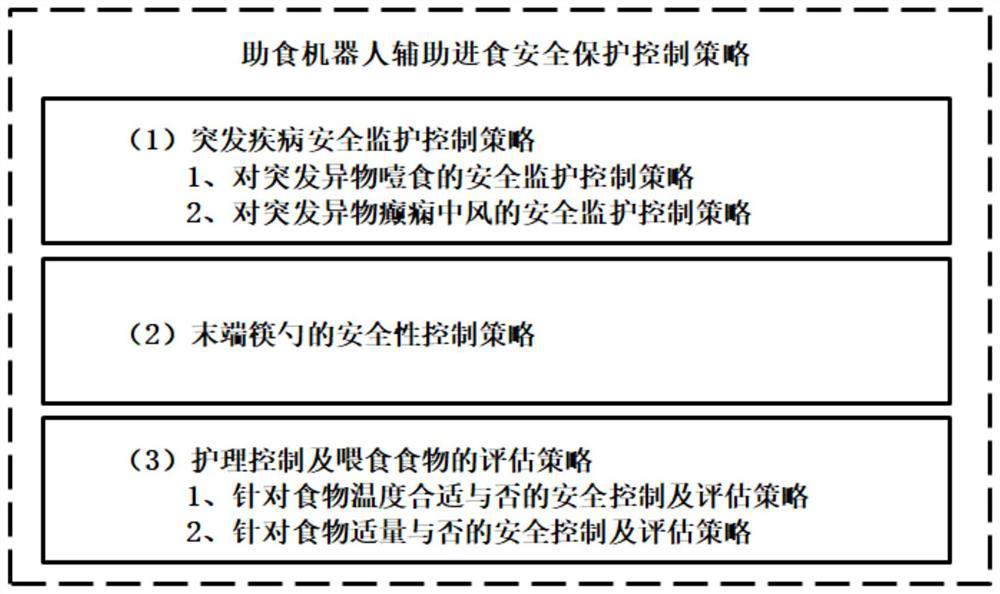
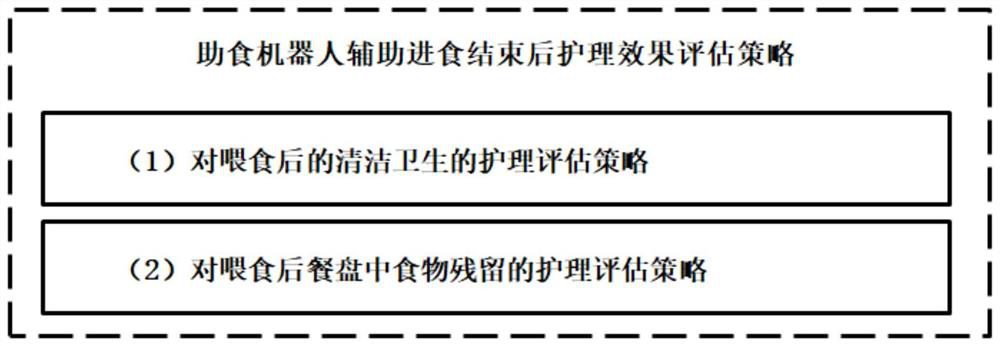
[0030] The present invention proposes a safety nursing control strategy based on multi-sensing food-assisting robot assisted eating (the present invention assumes that the patient can only lean forward, sideways and backward, the head can only nod and shake the head, and the five sense organs can move freely. paralyzed patients), its safety control strategy includes: After receiving the real-time visual image recognition and motion perception data of the patient's facial features, facial features, body posture and position changes, according to the patient's movement and facial features action information and the motion information of the food-assisted robot, the generated food-assisted robot provides the basic first control strategy for performing the assisted eating task, that is, the control strategy for the food-assisted robot to c...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More