

Navigation method of GNSS/INS integrated navigation system
A technology of integrated navigation system and navigation method, which is applied in the directions of radio wave measurement system, satellite radio beacon positioning system, measurement device, etc., can solve the problem that fisheye camera increases system cost and complexity, reduces filtering accuracy or even diverges, does not have Robustness and other issues, to achieve the effect of good application value, improved robustness and reliability, and low cost
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0015] See the claims for various specific implementation technical solutions provided by the present invention, combined below figure 1 The present invention is further introduced.
[0016] The present invention provides a navigation method of a GNSS / INS integrated navigation system, comprising:
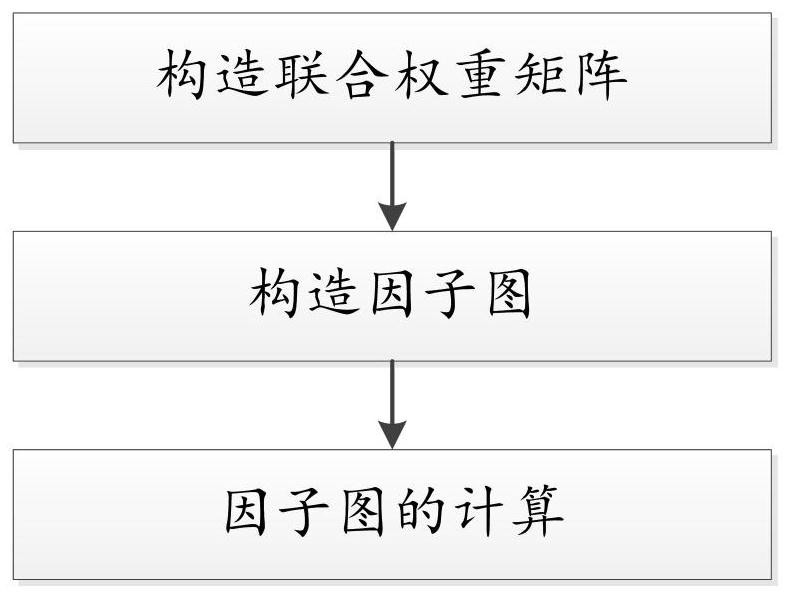
[0017] The first step is to construct the joint weight matrix
[0018] Assume that at a certain moment, after coherent integration of the I branch signal received by the GNSS receiver, the leading branch signal, the immediate branch signal, and the lagging branch signal obtained are respectively I E , I P , I L ; After the Q branch signal is coherently integrated, the leading branch signal, the immediate branch signal and the lagging branch signal are respectively Q E , Q P , Q L .
[0019] Use the following formula to obtain the pseudo-code phase error control amount DLI output by the phase detector as:
[0020]
[0021] Among them, d c is the coherent interval.
[002...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More