

Far-end and autonomous experiment robot device, and management system and method
A technology of robots and robot masters, which is applied to instruments, manipulators, program-controlled manipulators, etc., and can solve problems such as differences in personnel's professional ability, poor accuracy, and large differences in experimental details and experimental completion efficiency.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
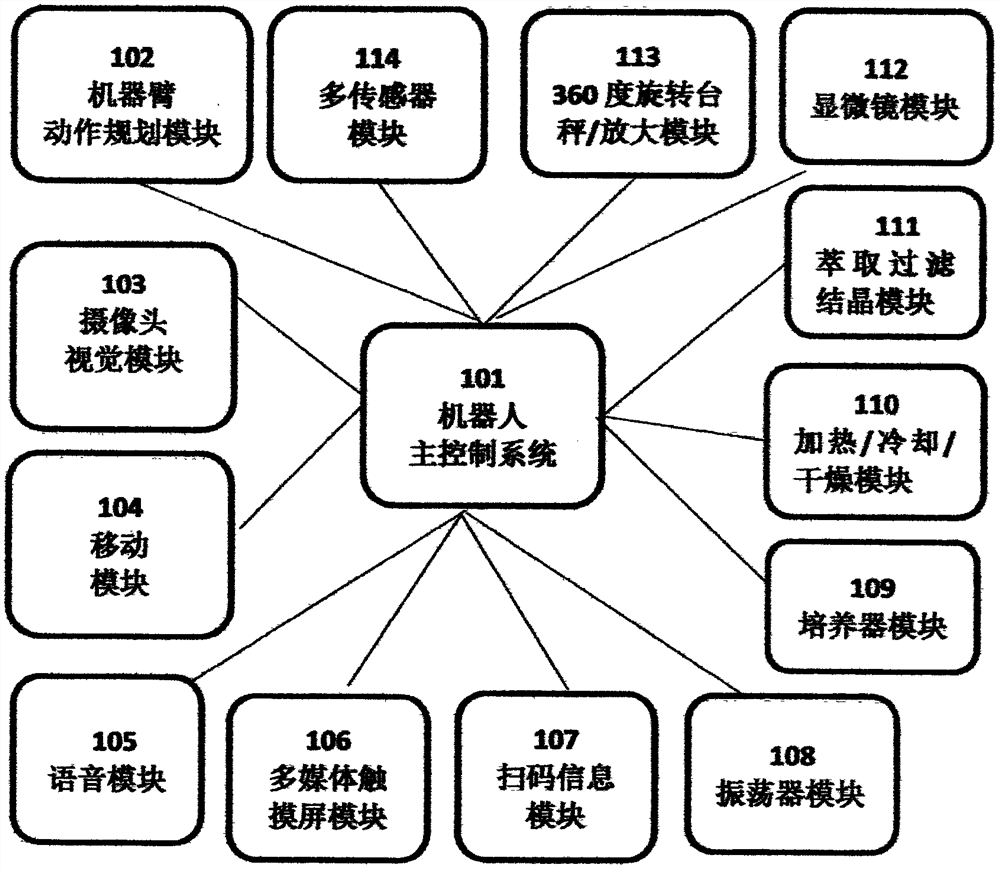
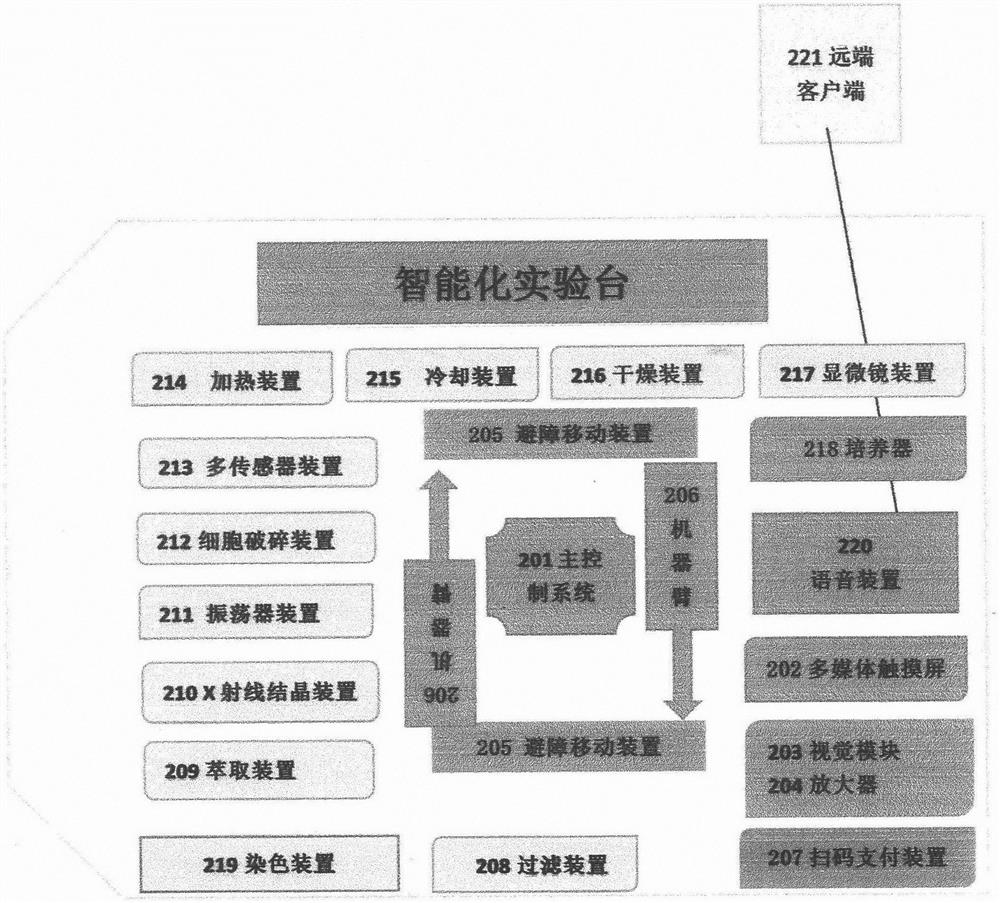
[0097] Such as figure 1 , figure 2 As shown, a remote and autonomous experimental robot device, management system and method embodiments include:
[0098] The robot master control system 201, the robot master control system 201, is used to control the robot. The robot main system 201 controls the communication of each robot node through the robot main system, and drives and operates each connected hardware device. The robot node communication module realizes inter-node publishing and receiver communication through communication methods such as messages, services, and actions.
[0099] The microscope 217 is connected with the robot main control system 201, and is used for visual collection of experimental samples, and the pictures under the microscope assist the intelligent identification of microorganisms, cells, etc.
[0100] The incubator device 218, the incubator device includes: dispensers, test tubes, beakers and other devices, used for culturing, filtering, separatin...
Embodiment 2
[0119] Such as figure 1 , figure 2 As shown, the experimental robot device visual recognition experimental device, the method of experimental label color identification, and the robotic arm motion grasping experimental device, the steps are as follows:
[0120] Set the corresponding experimental device parameters and corresponding position parameters of the experimental scene, input the experimental device corresponding to the experimental platform, the mathematical model of the experimental label color, number, letter, text, and special logo. In the experimental scene, the shape, outline, color, number, letter, text, and special logo image of the vessel are extracted, and the corresponding image features are used as input values. Improve the weight optimizer, quickly train the image, and get the output value. Accurately identify the target, specify the target and locate the target position according to the special identification results of the output shape, contour, struct...
Embodiment 3
[0128] On the basis of Embodiments 1 and 2, the robot main control system 201 module and the visual recognition module 203 interact with the robot arm 206, target setting, identification, positioning, use the robot arm 206 to correspond, and the robot arm 206 action planning to grab and move , scan the code, place the experimental vessel, the experimental sample, and press the action. The implementation of the robot arm 206 of the present invention is not limited to this, and the specific implementation steps are as follows:
[0129] Through the management system and the voice module 220 of the robot main control system 201 call, voice command, voice interaction, browse and query experimental data. Use the experiment appointment module to make an appointment for the experiment, and remind the experimenter according to the time and appointment. Use the camera and the vision module 203 to monitor, observe, and zoom in on the experimental vessels and experimental samples in real ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More