

Stacked scattered target point cloud segmentation method based on convex region growth
A technology of region growth and target points, applied in image analysis, image enhancement, instruments, etc., can solve the problems of low operation efficiency, unsatisfactory segmentation effect, etc., to avoid over-segmentation and under-segmentation, accurate normal estimation, strong The effect of adaptability and robustness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0049] The specific implementation of the present invention will be further described below in conjunction with the accompanying drawings and examples.
[0050] The present invention is a point cloud segmentation method of stacked scattered objects based on convexity region growth, which divides the point cloud of stacked scattered objects according to the normal vector, curvature and concave-convex information of the three-dimensional point cloud, and obtains the point cloud data of each object, which is convenient for follow-up Implement steps such as point cloud recognition and registration.
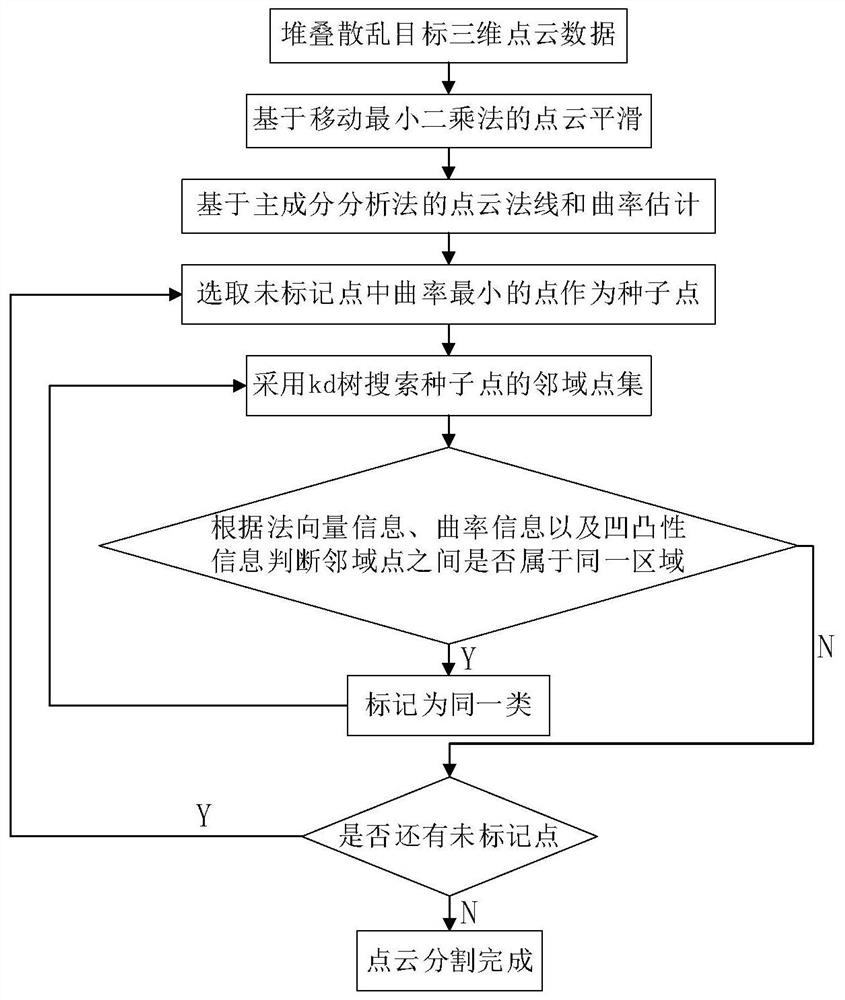
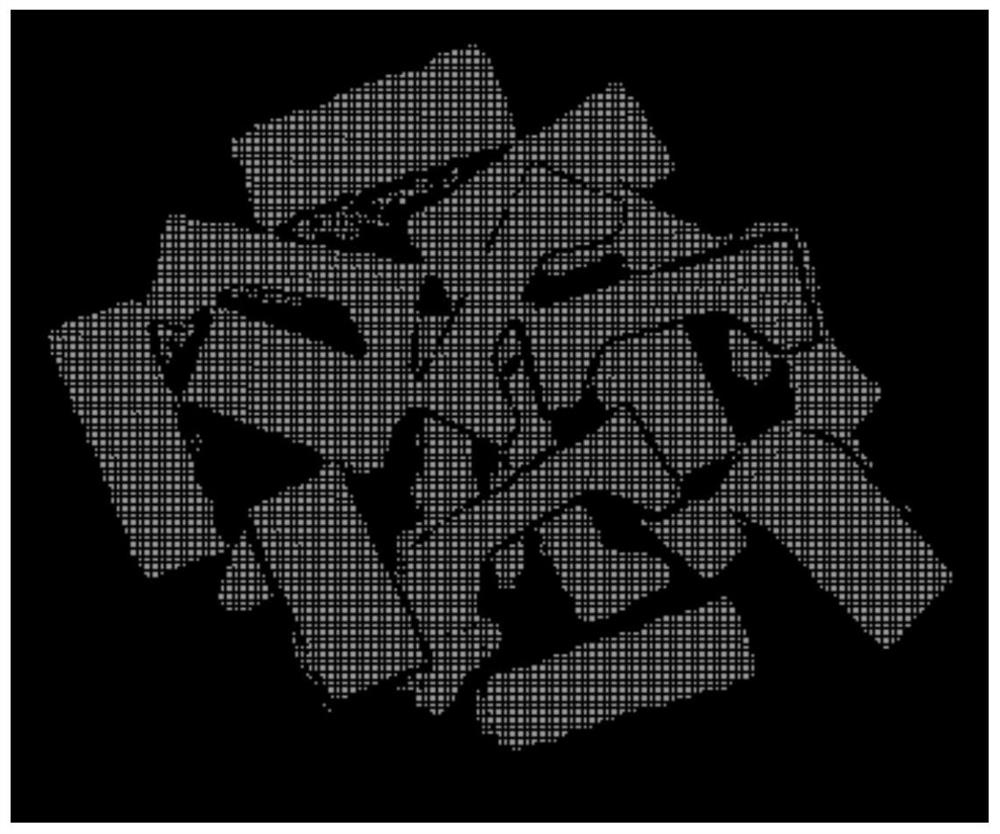
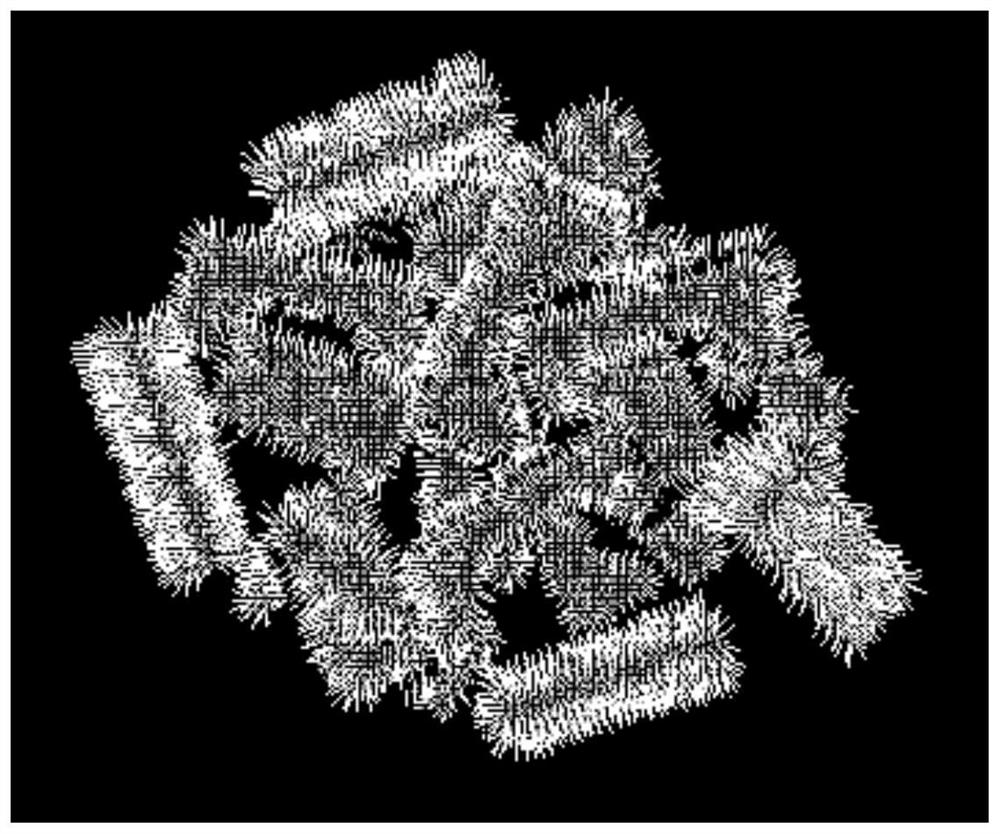
[0051] figure 1 It is an implementation flowchart of a method for segmenting point clouds of stacked scattered objects based on convex region growth in the present invention, figure 2 For the stacked scattered target point cloud image to be segmented in this example, the specific implementation steps are as follows:
[0052] Step 1. There may be some noise points and invalid points...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More