

Robot control method with optimal energy
A control method and energy-optimized technology, applied in the direction of program control of manipulators, manipulators, manufacturing tools, etc., can solve the problems of high cost, slow calculation, and no consideration of the torque limit of manipulator arm joints, so as to improve efficiency and improve real-time performance. , the effect of reducing the output power
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment
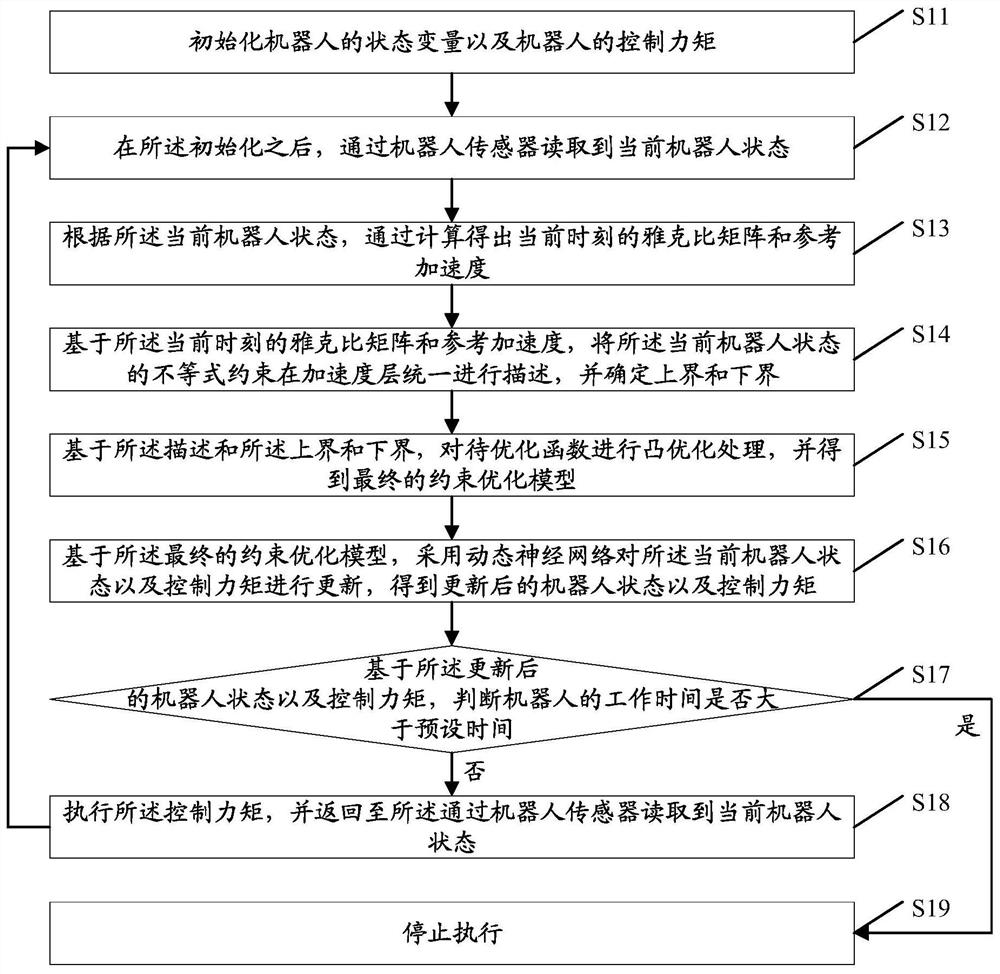
[0063] see figure 1 , figure 1 It is a schematic flow chart of an energy-optimized robot control method in the implementation of the present invention.
[0064] Such as figure 1 Shown, a kind of energy optimal robot control method, described method comprises:
[0065] S11: Initialize the state variables of the robot and the control torque of the robot;
[0066] Specifically, at time t=0, the state variables of the robot and the control torque of the robot are initialized to ensure that they are not disturbed by other factors.
[0067] S12: After the initialization, read the current state of the robot through the robot sensor;
[0068] In the specific implementation process of the present invention, after the initialization, the current state of the robot is read by the robot sensor, and the current state of the robot includes: joint angles, angular velocities and angular accelerations of the robot.
[0069] S13: According to the current state of the robot, calculate the J...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More