

A direct-drive quadruped robot with variable leg configuration
A quadruped robot and configuration technology, applied in the field of robotics, can solve the problems of difficult control system design, inability to record joint zero position, increase leg inertia, etc. The effect of large swing speed
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0040] The technical solutions of the present invention will be clearly and completely described below with reference to the accompanying drawings. Obviously, the described embodiments are a part of the embodiments of the present invention, but not all of the embodiments. Based on the embodiments of the present invention, all other embodiments obtained by those of ordinary skill in the art without creative efforts shall fall within the protection scope of the present invention.
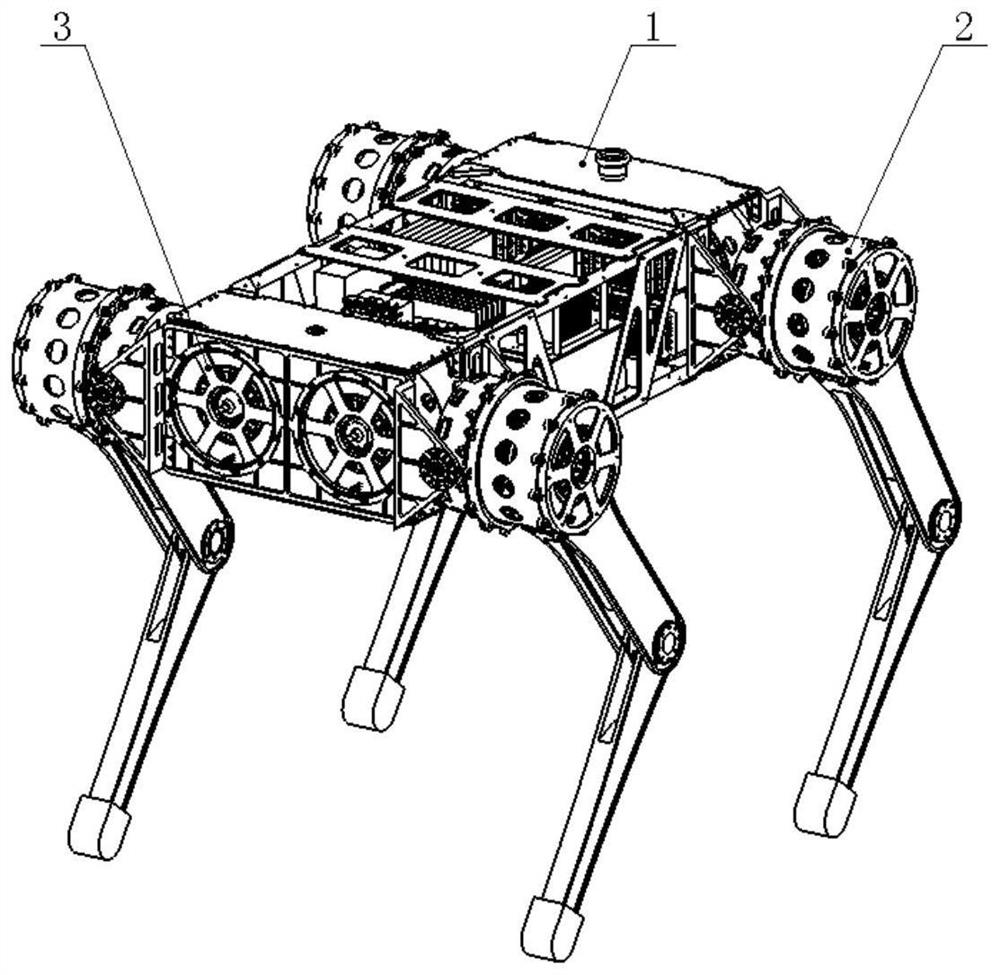
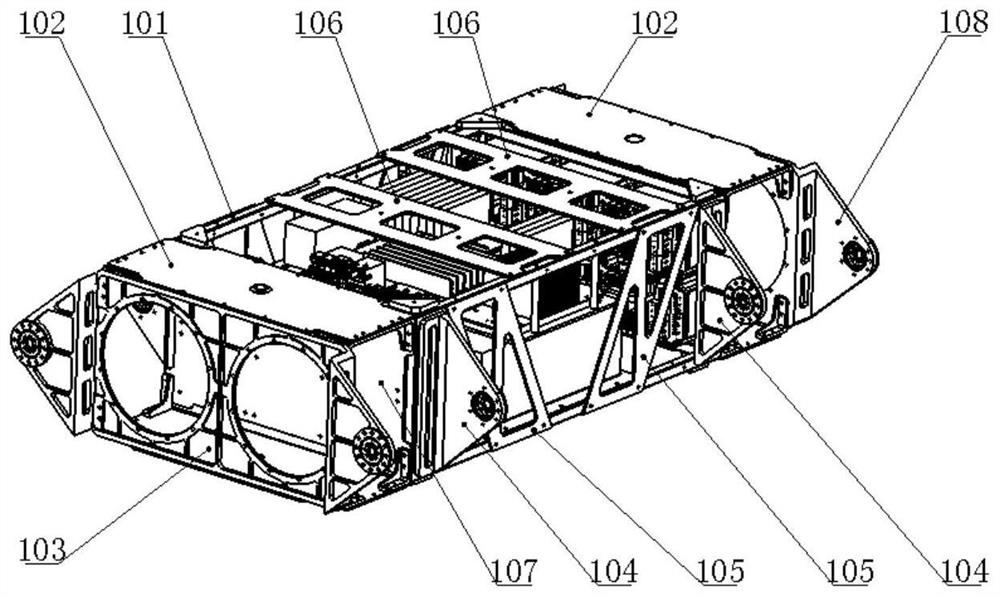
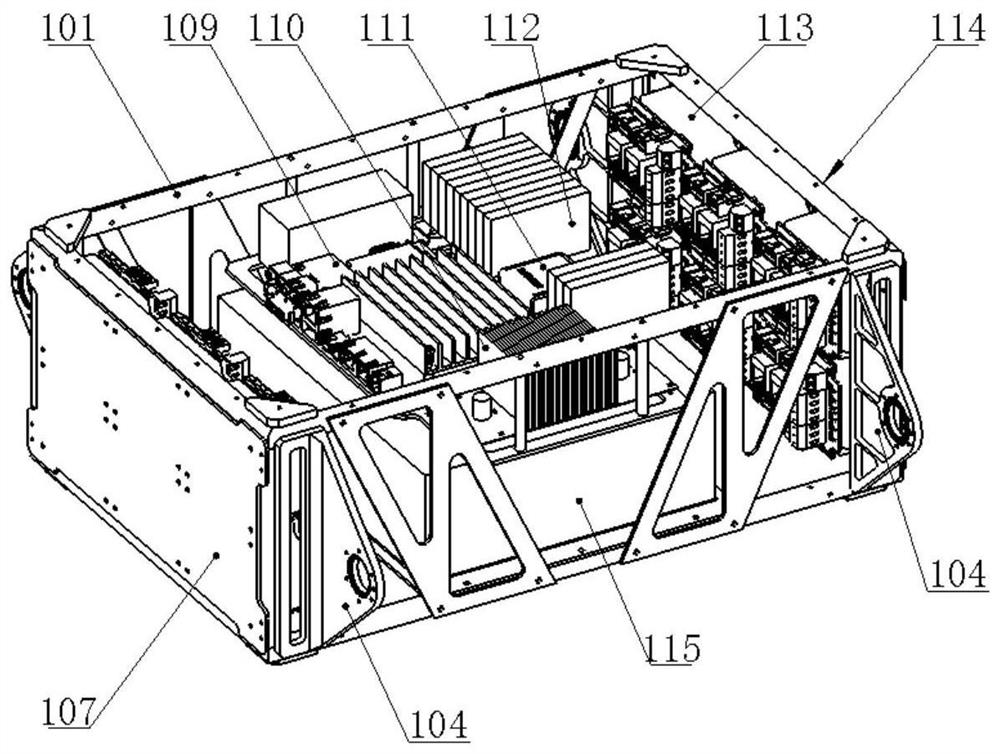
[0041] This embodiment provides a direct-drive quadruped robot with variable leg configuration, including a trunk 1, legs 2 and hips 3; the trunk 1 is used to install a control system and a power supply system 115, and the control system is used to control The action of the leg 2 and the hip 3, the power supply system 115 supplies power to the control system, the leg 2 and the hip 3; the leg 2 is rotated and connected to the outside of the trunk 1, and the thigh motor stator housing 218 of the leg 2 A...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More