

Electric heating driving-type soft gripper capable of simulating gecko toes and preparation method thereof
An electrothermal drive, gecko technology, applied in the field of manipulators, can solve the problems of not firmly grasping, soft and fragile objects difficult to achieve safe grasping, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
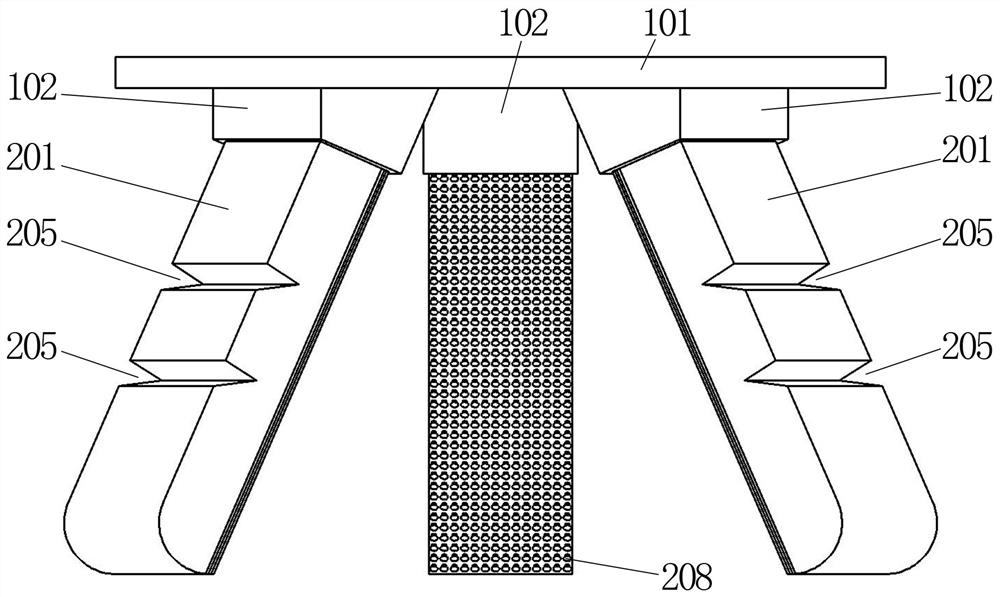
[0047] An electrothermally driven soft gripper for bionic gecko toes, including a base and three bionic fingers of the same size;
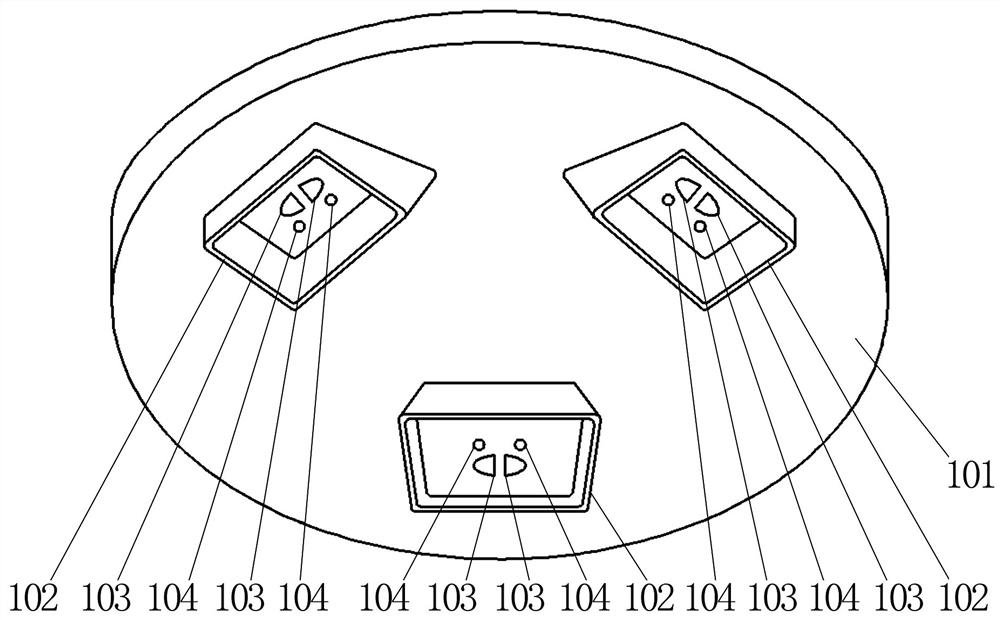
[0048] The base includes a disc-shaped seat body 101; the front of the disc-shaped seat body 101 is extended with three insertion slots 102, and the three insertion slots 102 are symmetrically distributed around the center line of the disc-shaped seat body 101; A pair of outer threading holes 103 and a pair of inner threading holes 104 are opened between the bottom of the socket 102 and the back of the disc-shaped seat 101;
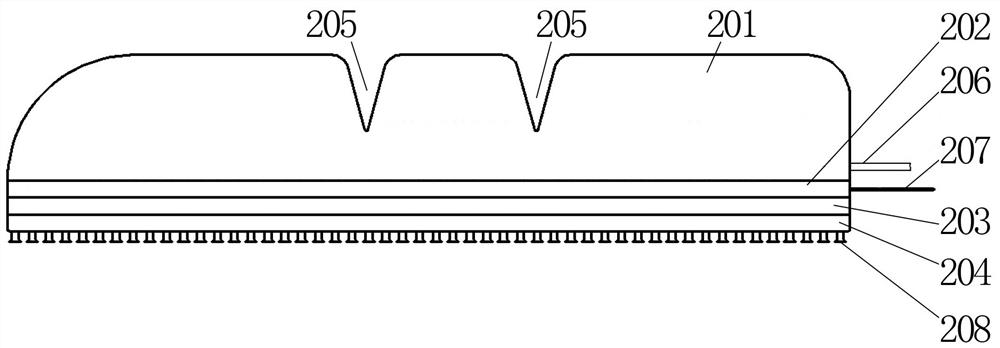
[0049] Each bionic finger includes a strip-shaped artificial muscle layer 201, a strip-shaped flexible heat transfer layer 202, a strip-shaped variable stiffness layer 203, and a strip-shaped flexible contact layer 204; the back side of the strip-shaped artificial muscle layer 201 is opened along the width direction. There are two V-shaped grooves 205; the inside of the bar-shaped artificial muscle layer 201 is embedded with ...
PUM
| Property | Measurement | Unit |
|---|---|---|
| Thickness | aaaaa | aaaaa |
| Diameter | aaaaa | aaaaa |
Abstract
Description
Claims
Application Information
 Login to View More
Login to View More