

Non-cooperative spacecraft pose integrated estimation and inertial parameter determination method
A technology for determining inertial parameters and methods, which is applied in the field of spacecraft navigation, can solve problems such as the decrease in the accuracy of pose estimation, achieve strong engineering realization, reduce the requirements for computing power and data training, and achieve outstanding real-time and computing efficiency Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0083] The present invention will be described in detail below in conjunction with the accompanying drawings and embodiments.
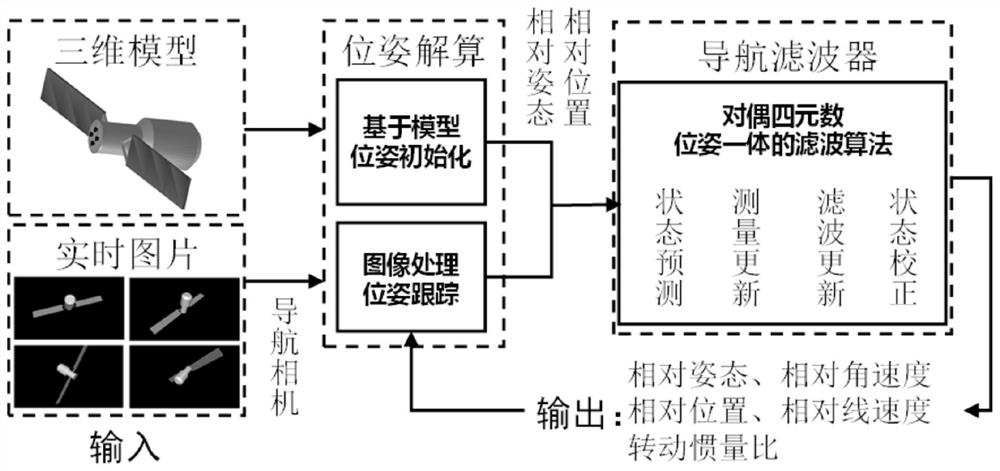
[0084] figure 1 It is a functional block diagram of the dual quaternion-based relative navigation system according to the present invention. The above-mentioned system is composed of three parts: a navigation camera, a pose calculation module and a navigation filtering algorithm. First, the 3D model of the target spacecraft is known, and the real-time on-orbit picture of the target spacecraft is taken by the navigation camera, after the background is removed and denoised; then it is sent to the pose calculation module and calculated by the model-based pose calculation method Rough relative attitude and relative position; finally, the precise pose and inertia parameters are recursively calculated by the navigation filter, and the pose parameters are updated to the pose calculation module to achieve real-time tracking.
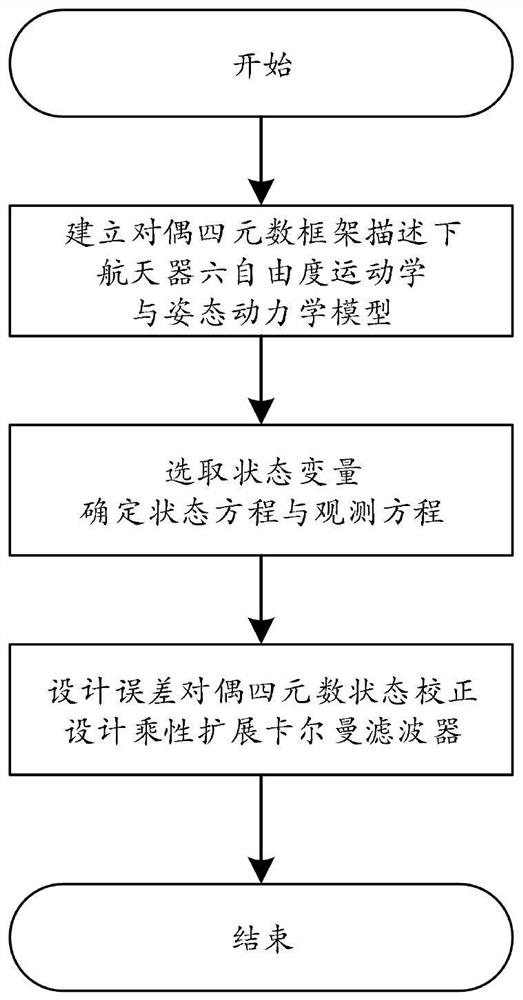
[0085] Such as figure 2 As sh...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More