

Aircraft no-fly zone avoidance trajectory planning method based on path point optimization
A technology of trajectory planning and waypoints, applied in the direction of instruments, vehicle position/route/height control, non-electric variable control, etc., to achieve the effect of good manufacturability, strong applicability, and scientific methods
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0041] The present invention will be further described in detail below in conjunction with the accompanying drawings and examples of implementation.
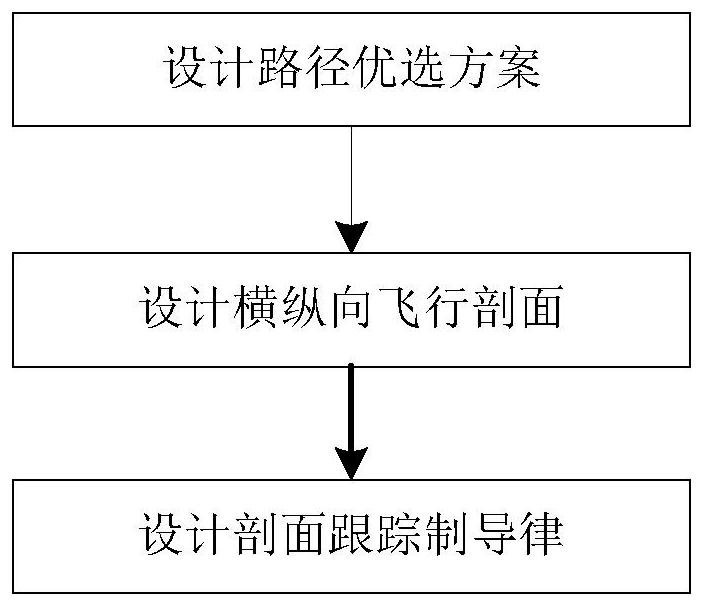
[0042] The present invention provides an aircraft no-fly zone avoidance trajectory planning method based on waypoint optimization, the flow chart of which is as follows figure 1 As shown, it includes the following steps:
[0043] Step 1. Way point optimization scheme design;
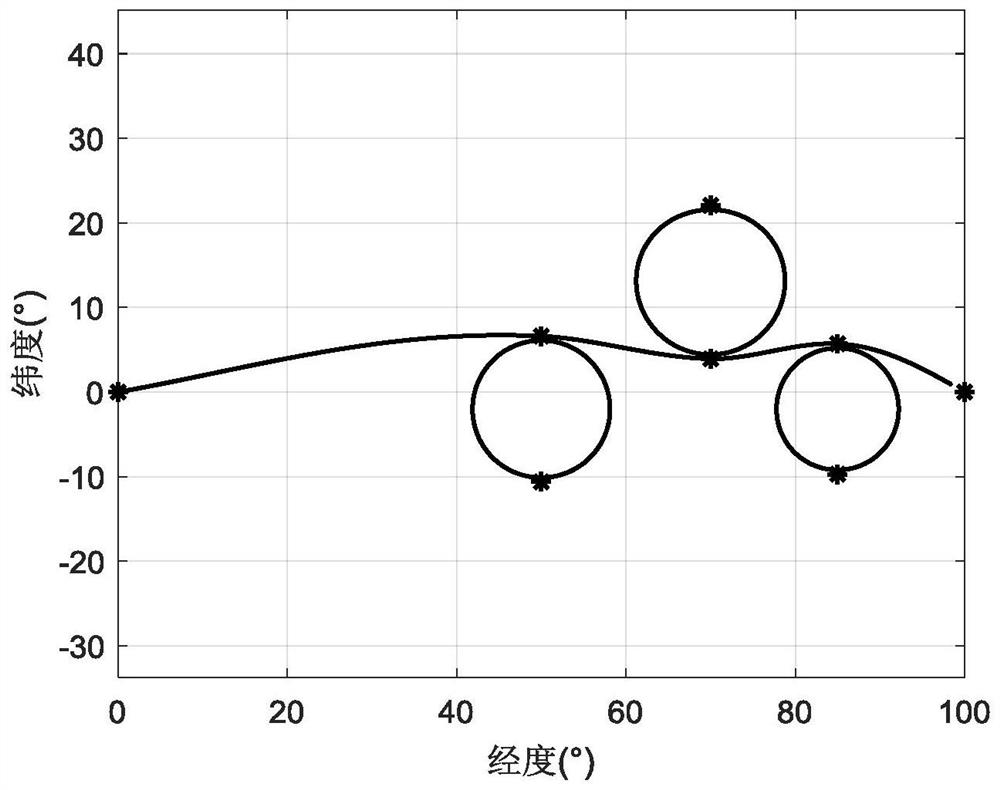
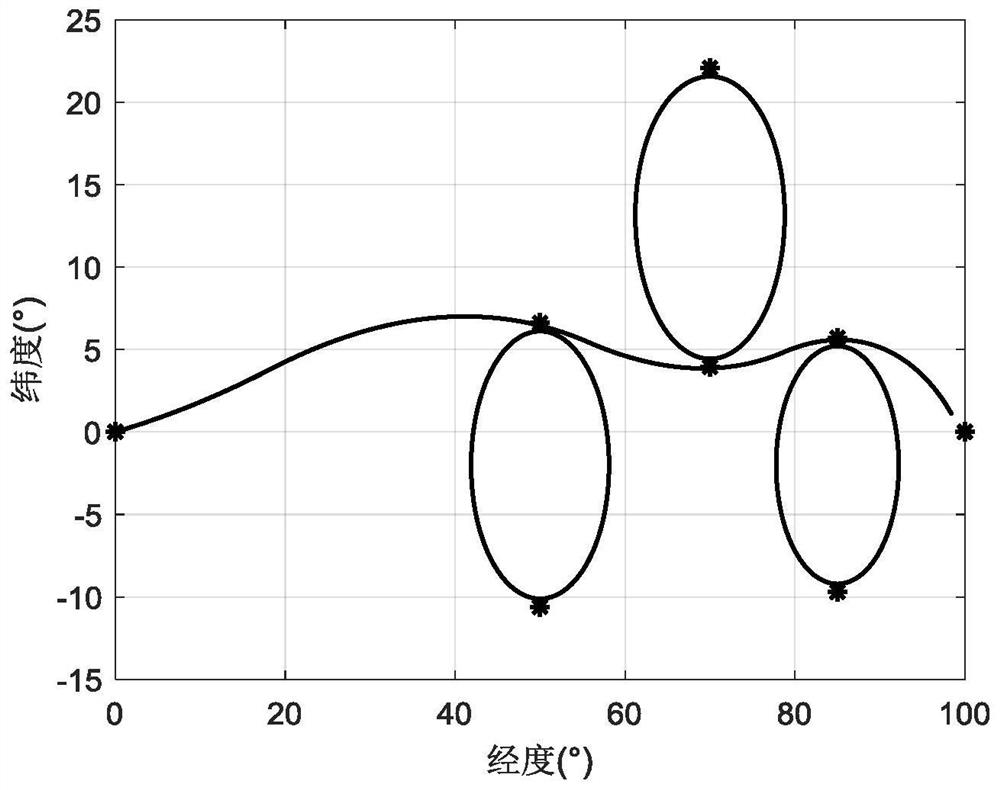
[0044] Design virtual path points based on the relative positions of each no-fly zone, establish a directed graph model, traverse the feasible flying paths of the aircraft, perform path point tracking guidance for each path, and obtain the path evaluation index through simulation, and calculate the path with the best index The preferred solution as a waypoint.
[0045] First, design virtual path points based on the relative positions of each no-fly zone, and establish upper and lower nodes for each no-fly zone, as the decision point or inflection point o...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More