

Self-adaptive control method for teleoperation system under saturation of actuator
An adaptive control and operating system technology, applied in the field of remote operating system, can solve problems such as loss of stability, prolonged adjustment time, and reduced tracking accuracy of the remote operating system, so as to improve the ability of anti-saturation, improve robustness and control The effect of precision
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
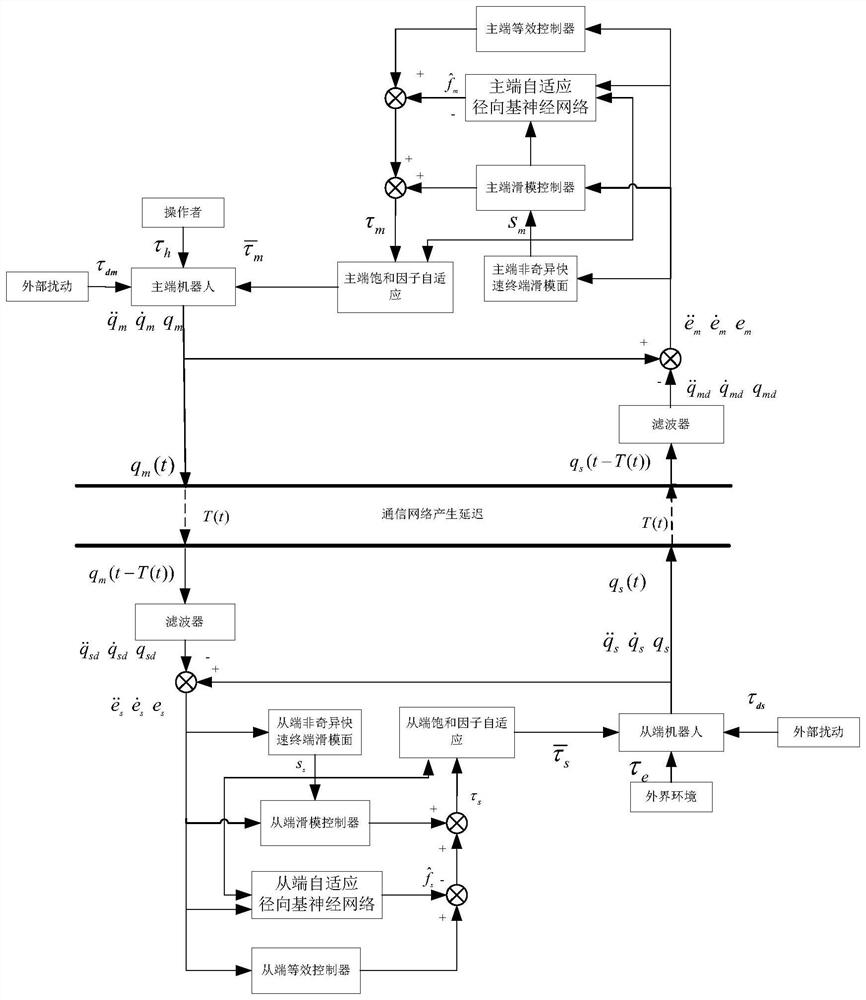
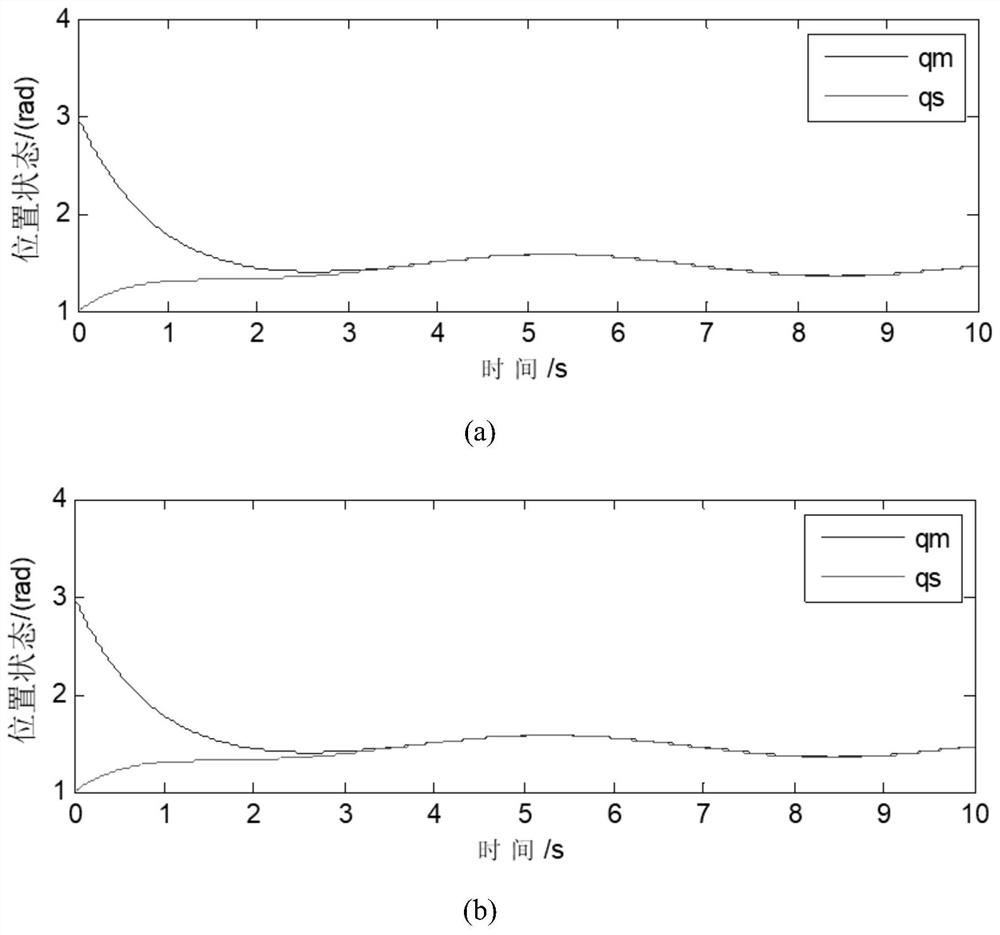
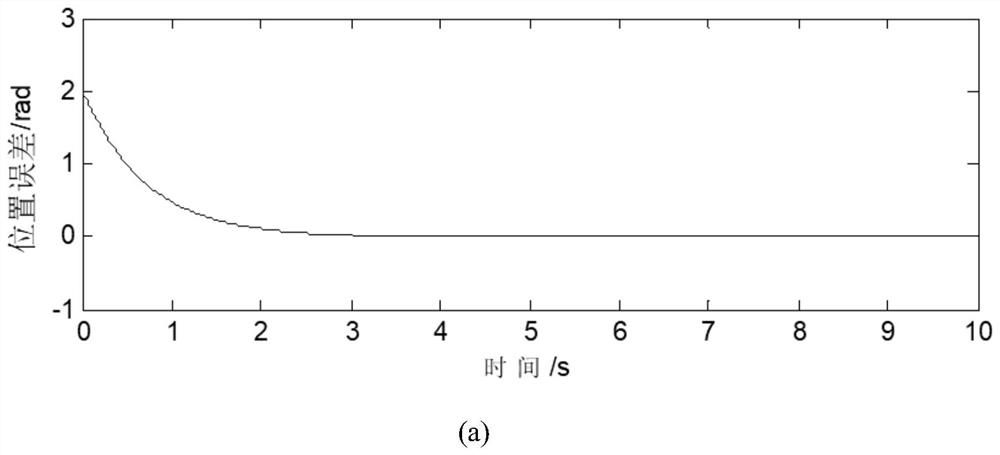
[0077] Such as Figure 1-4 As shown, the present invention is a simulation study of the master-slave end of the bilateral teleoperation control system achieving tracking stability under actuator saturation. The specific operation steps are as follows:
[0078] Step 1: Establish a teleoperation system dynamics model:
[0079] The present invention uses two identical Geomagic Touch robots as the simulation objects of the teleoperation system, and the first joint q 1 is the spherical base, q 2 ,q 3 For the rod-shaped part connected to it, regardless of the state of the last stylus, it is only for manipulating the position of the end of the third joint.
[0080] Since the second and third joints of the manipulator move on the same horizontal plane, in order to simplify the calculation, we lock the second joint here, and only take the angle variable q of the first and third joints 1 ,q 3 research. According to the performance index of Geomagic Touch, its maximum output torqu...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More