Design method of attitude subsystem controller for attitude angle control input saturation
A design method and subsystem technology, applied in the direction of attitude control, control/regulation system, non-electric variable control, etc., can solve the problems of poor control effect of drones, destructive disasters of drones, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
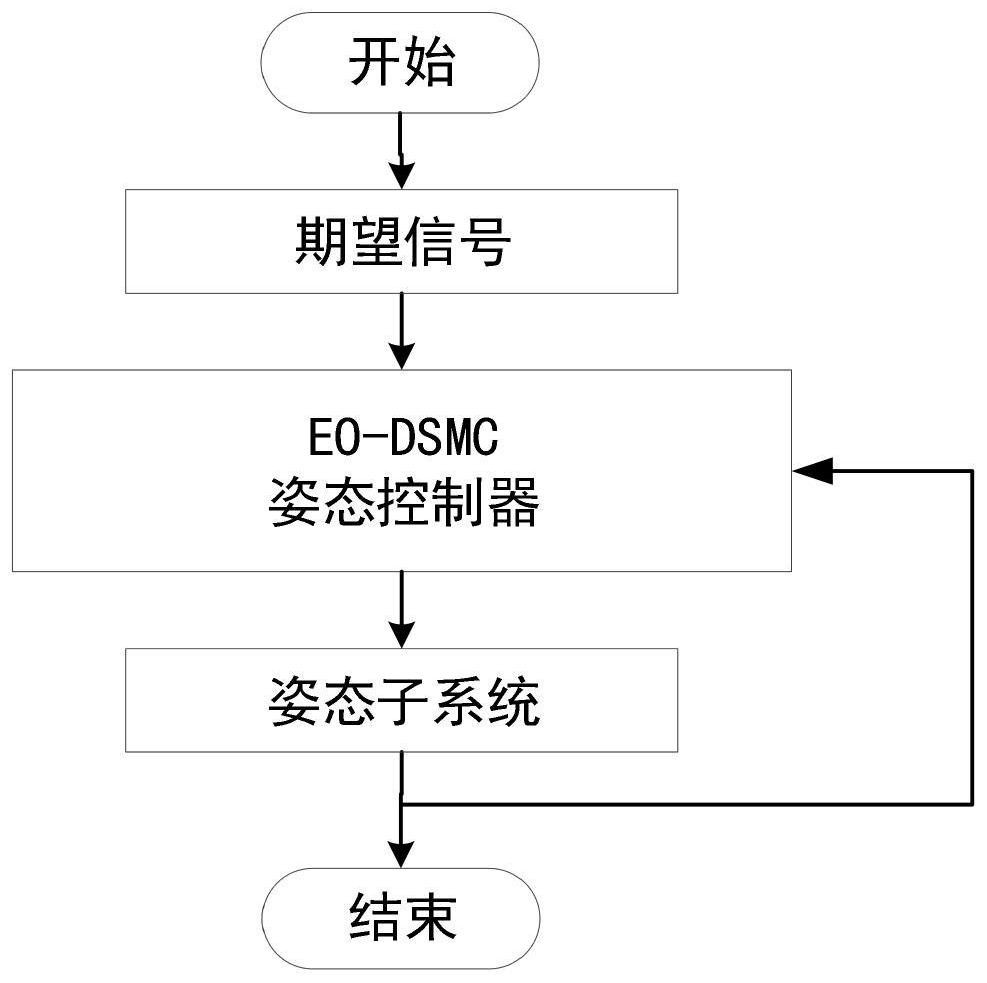
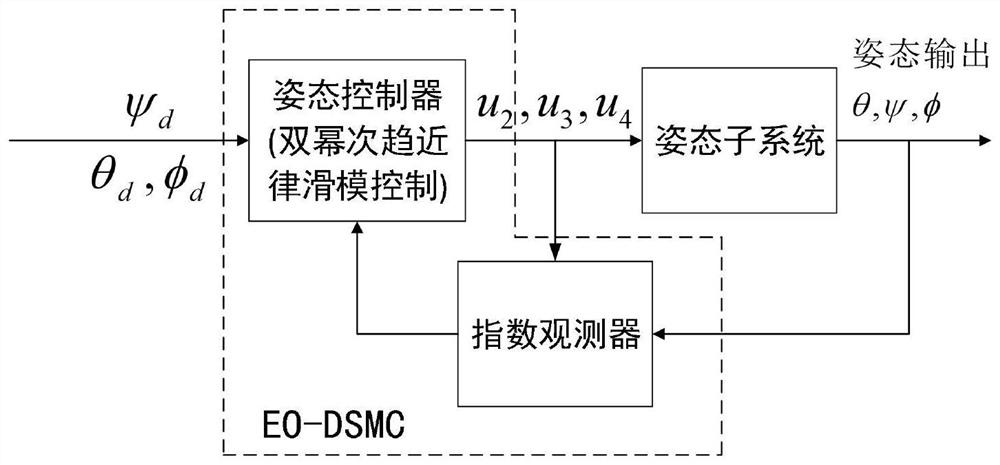
[0048] The design method of the attitude subsystem controller for the attitude angle control input saturation, the overall process can be found in figure 1 , first input the expected signal into the attitude controller designed by the present invention, use the exponential observer in the attitude controller to observe the attitude of the UAV, and feed back the observed attitude to the sliding mode attitude combined with the double power approach rate In the controller, the virtual control output by the attitude controller is input into u 2 ,u 3 ,u 4 Input to the attitude subsystem to get the attitude angle φ, θ, ψ of the UAV. During the flight process of the UAV, it can be continuously updated to obtain the new attitude angle of the UAV. The attitude controller designed by the present invention specifically comprises the following steps:
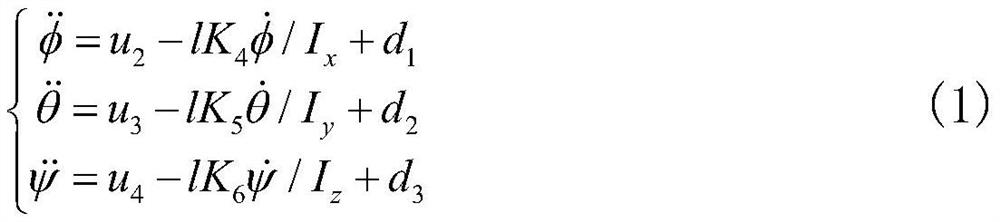
[0049] Step 1, attitude angle control input saturation processing analysis:
[0050] During the flight of the quadrotor UAV, there is ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More