

Unmanned aerial vehicle three-dimensional flight path tracking method based on adaptive sight line method
A track tracking and UAV technology, which is applied in three-dimensional position/channel control, vehicle position/route/altitude control, non-electric variable control, etc. Incomplete track tracking and other problems, to achieve the effect of improving the delay of switching reference track segments, improving robustness, and simplifying track tracking problems
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
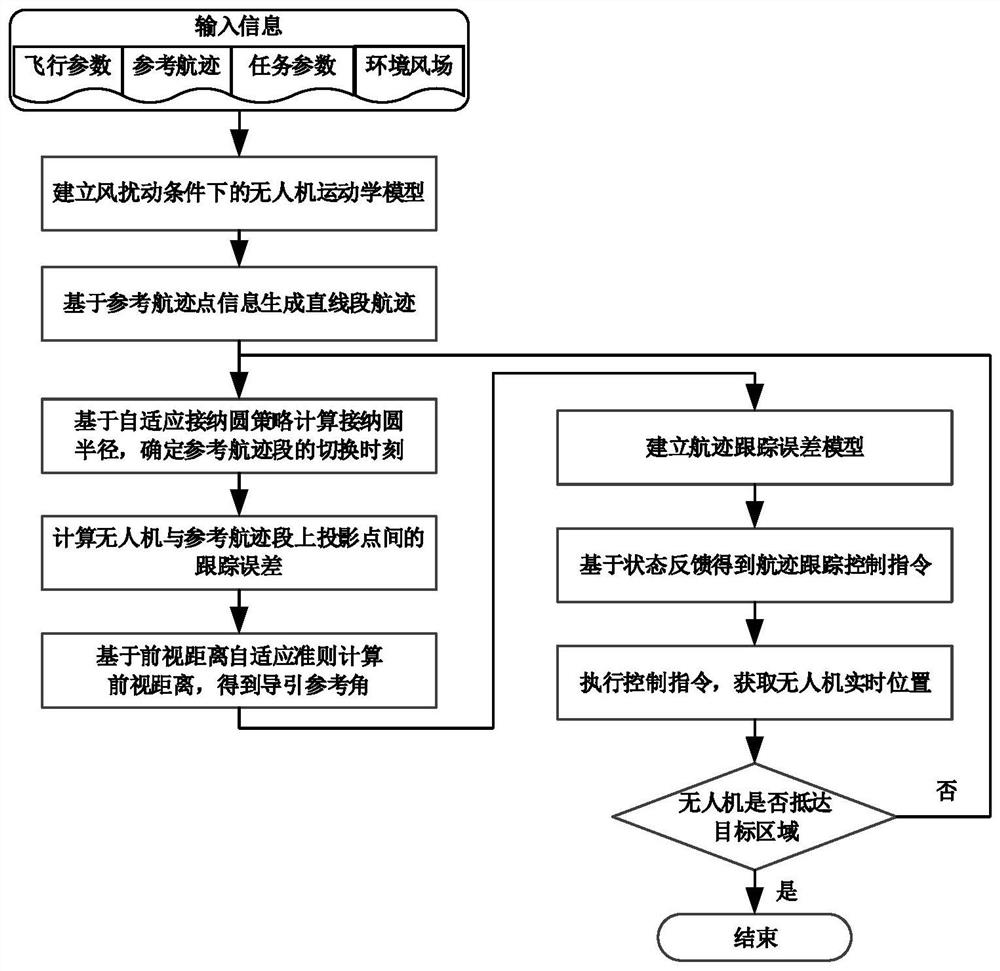
[0092] Such as figure 1 As shown, the UAV three-dimensional track tracking method based on the adaptive line-of-sight method disclosed in this embodiment is applicable to the three-dimensional track tracking control problem of the UAV. In order to verify the effectiveness and robustness of the proposed method, a numerical simulation experiment of UAV three-dimensional track tracking without wind field disturbance is carried out. The simulation hardware is Intel Core 7-6700 CPU 3.40GHz16.0GB memory, and the simulation environment is MATLAB .
[0093] Step 1: Input UAV flight performance parameter information, planned reference track information, task information and environmental information.
[0094] In this example, set the drone's flight true speed to V a =30m / s, minimum turning radius R min =50m, maximum acceleration a in horizontal and vertical directions ymax =V a 2 / R min =18m / s 2 , a zmax =0.3g=2.94m / s 2 . The starting position of the UAV is [0m, -50m, 0m], a...
Embodiment 2
[0150] Such as figure 1 As shown, the UAV three-dimensional track tracking method based on the adaptive line-of-sight method disclosed in this embodiment is applicable to the three-dimensional track tracking problem of the UAV under the condition of wind field disturbance. In order to further verify the anti-jamming ability of the proposed method, a numerical simulation test of UAV three-dimensional track tracking under wind disturbance is carried out. The simulation hardware is Intel Core 7-6700CPU 3.40GHz 16.0GB memory, and the simulation environment is MATLAB.
[0151] Step 1: Input UAV flight performance parameter information, planned reference track information, task information and environmental information.
[0152] In this example, set the drone's flight true speed to V a =30m / s, maximum acceleration a in horizontal and vertical directions ymax =18m / s 2 ,a zmax =2.94m / s 2 . The starting position of the UAV is [0m, -50m, 0m], and the initial track deviation and tr...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More