

Intelligent calibration method for internal and external parameters of binocular camera based on coding plane target
A binocular camera and planar target technology, which is applied in image data processing, image analysis, image enhancement, etc., can solve the problem that the planar target cannot be photographed, the calibration process is inflexible, and the rotation direction of the planar target without direction information cannot be judged, etc. question
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0281] The preferred embodiments of the present invention will be described in detail below in conjunction with the accompanying drawings, so that the advantages and features of the present invention can be more easily understood by those skilled in the art, so as to define the protection scope of the present invention more clearly.
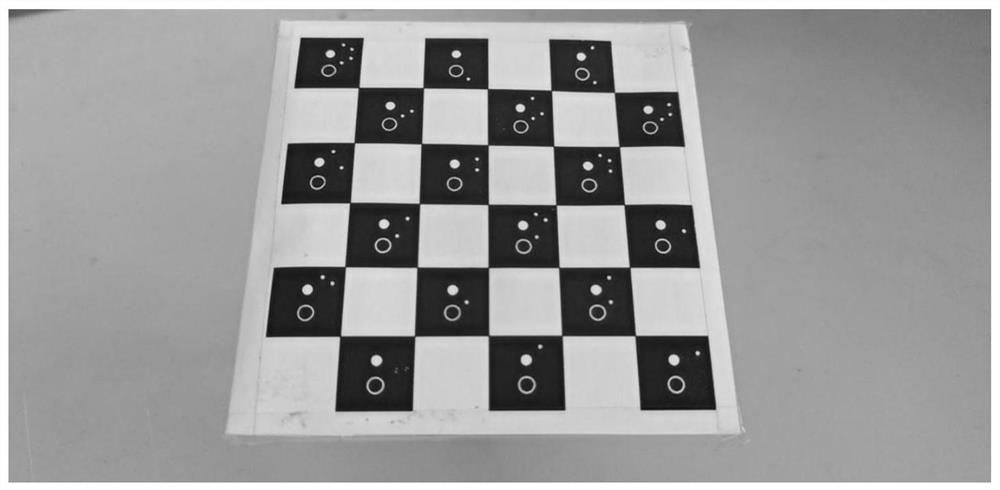
[0282] This embodiment uses a MER-231-41U3C color industrial camera, the camera captures a maximum frame rate of 40 frames, a pixel size of ×5.86 microns, and an image resolution of 1920×1200; the model of the camera lens is HN-1216 -5M-C2 / 3X, the focal length of the lens is 12mm. The state of experimental equipment setup is as follows: figure 1 shown.
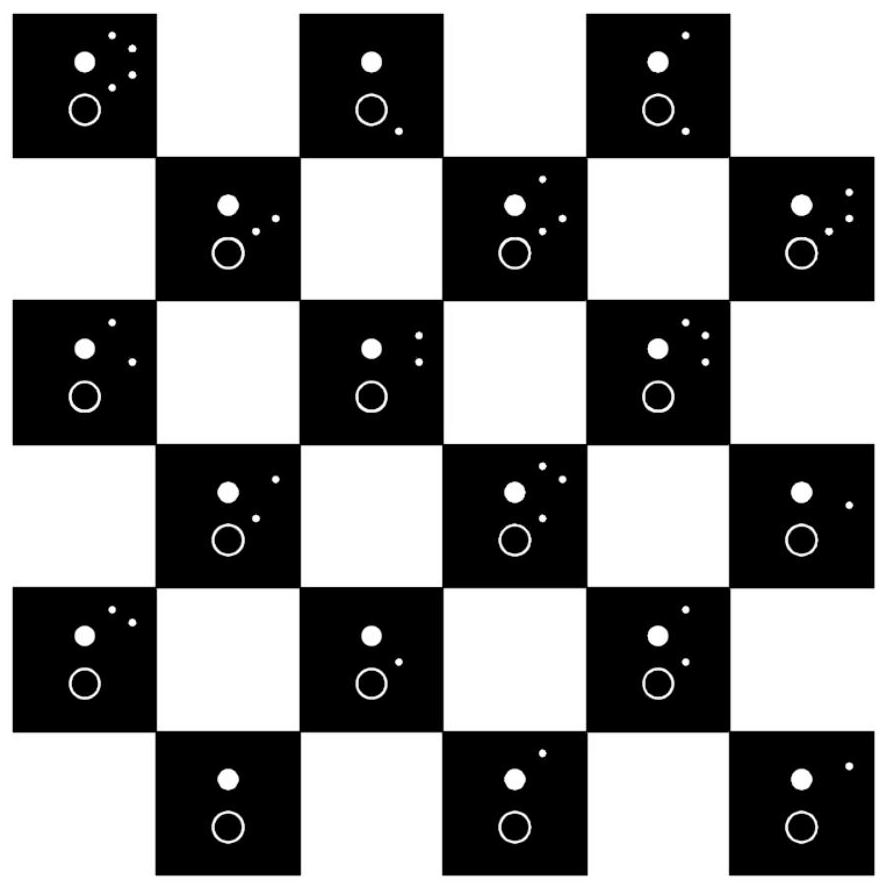
[0283] see figure 2 and image 3 , a coding plane target used for camera internal and external parameter calibration, the coding plane target is composed of a coding checkerboard composed of parallelogram coding units and parallelogram non-coding units alternately, the coding plane target is ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More