

Binocular vision position measurement system and method based on deep learning
A binocular vision and deep learning technology, applied in neural learning methods, measurement devices, optical devices, etc., can solve the problem of inability to take into account measurement applicability and accuracy, and achieve a simplified feature extraction network, network parameters reduction, and improvement. real-time effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0074] In order to better illustrate the purpose and advantages of the present invention, the content of the invention will be further described below in conjunction with the accompanying drawings.
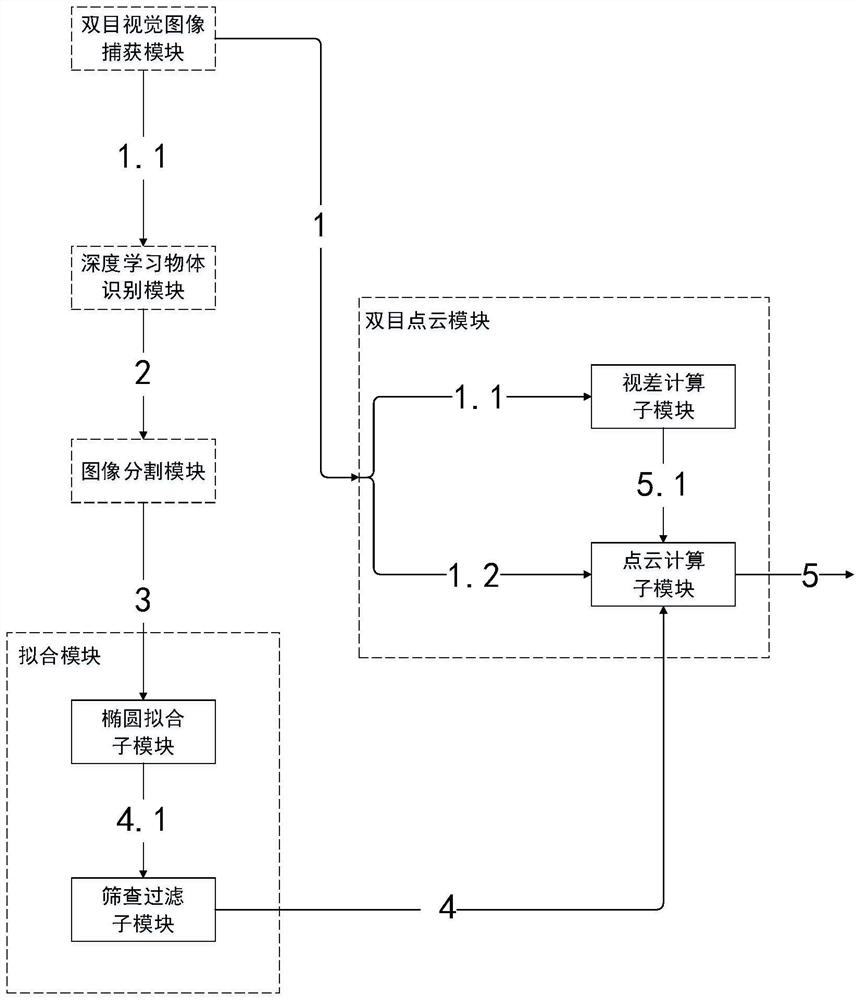
[0075] Such as figure 1 As shown, a binocular vision position measurement system based on deep learning disclosed in this embodiment includes a binocular vision image capture module, a deep learning object recognition module, an image segmentation module, a fitting module, and a binocular point cloud module.
[0076] The binocular vision image capture module is used to capture and collect the image data of the left and right cameras, and use the epipolar correction method to correct the camera distortion. The output is the RGB three-channel image of the left and right cameras of the binocular camera after epipolar correction, and the internal reference and baseline of the left and right cameras.
[0077] The deep learning object recognition module, the input is the RGB three-chan...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More