

Wrist turning mechanism and surgical robot
A technology of surgical robot and rotation axis, which is applied in the field of medical devices, can solve the problems of flexible adjustment of end tools, difficult adjustment of jaw direction, cross-infection, etc., to avoid repeated cleaning and sterilization and cross-infection, simplify assembly process, The effect of reducing the number of parts
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment approach 1
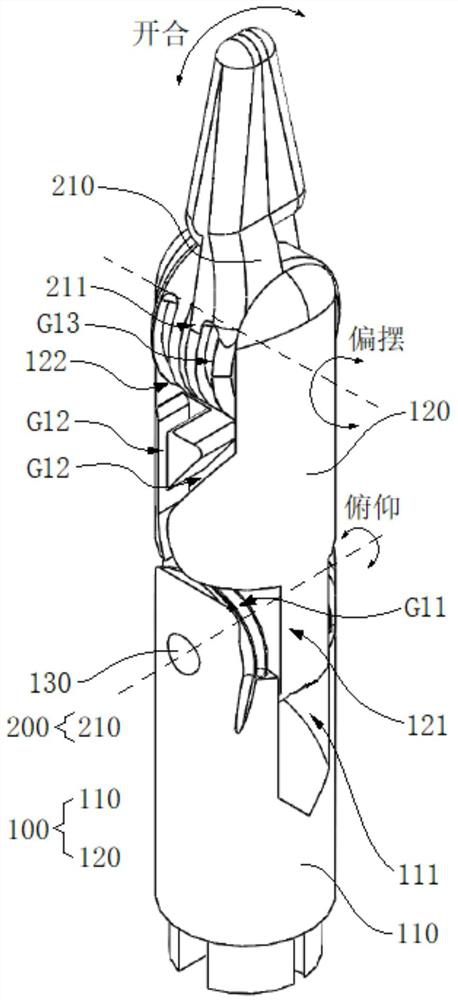
[0056] refer to figure 1 , which typically shows a perspective view of the wrist rotation mechanism proposed by the present invention. In this exemplary embodiment, the wrist rotation mechanism proposed by the present invention is described by taking related instruments applied to laparoscopic surgery as an example. Those skilled in the art can easily understand that, in order to apply the relevant design of the present invention to other types of medical devices, various modifications, additions, substitutions, deletions or other changes are made to the following specific embodiments, these Variations are still within the scope of the principles of the wrist mechanism proposed by the present invention.
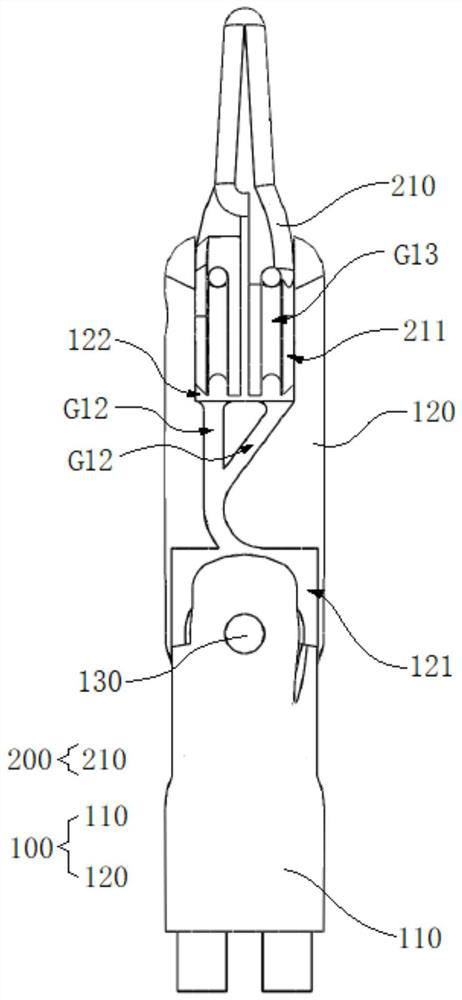
[0057] like figure 1 As shown, in this embodiment, the wrist rotation mechanism proposed by the present invention includes a bracket, an end tool and a cable. Cooperate with reference Figure 2 to Figure 6 , figure 2 representatively shows a front view of a wrist rotati...
Embodiment approach 2
[0076] Based on the above detailed description of the first embodiment of the wrist rotation mechanism proposed by the present invention, the following will be combined Figure 7 to Figure 10 , the second embodiment of the wrist rotation mechanism proposed by the present invention will be described. like Figure 7 to Figure 10 as shown, Figure 7 representatively shows a perspective view of the second embodiment of the wrist rotation mechanism proposed by the present invention; Figure 8 Representatively shows an exploded schematic view of the wrist rotation mechanism in the second embodiment; Figure 9 representatively shows a perspective view of the first bracket of the wrist rotation mechanism in the second embodiment; Figure 10 representatively shows Figure 9 A cross-sectional view of the first stent is shown. The main differences between the second embodiment and the first embodiment of the wrist rotation mechanism proposed by the present invention will be describe...
Embodiment approach 3
[0085] Based on the above detailed description of the second embodiment of the wrist rotation mechanism proposed by the present invention, the following will be combined Figure 11 , the third embodiment of the wrist rotation mechanism proposed by the present invention will be described. like Figure 11 as shown, Figure 11 is a representative perspective view of the first bracket of the wrist rotation mechanism in the third embodiment. The main differences between the third embodiment and the second embodiment of the wrist rotation mechanism proposed by the present invention will be described below with reference to the above-mentioned drawings.
[0086] like Figure 11 As shown, in this embodiment, the guide groove at the proximal end of the first bracket 110 can be directly formed by an arc-shaped surface, that is, the surface of the arc-shaped surface 112 can be used to guide the cable 300 . In other embodiments, such as the second embodiment, the guide groove G21 at t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More