

Directional scanning device and method for acquiring real-time position in implant drill needle operation
A scanning device and real-time position technology, applied in dental implants, dental repairs, educational appliances, etc., can solve problems such as unfavorable direct correspondence, deviation of measurement results, and increased risk of infection in the surgical area, so as to achieve convenient use and improve accuracy Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
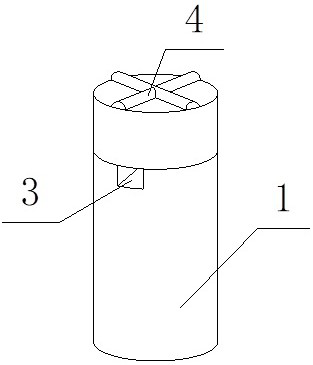
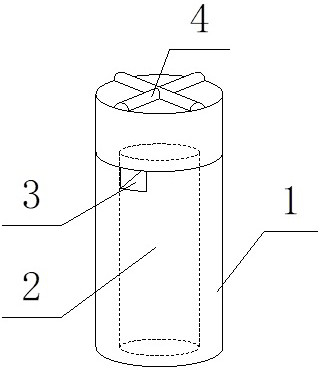
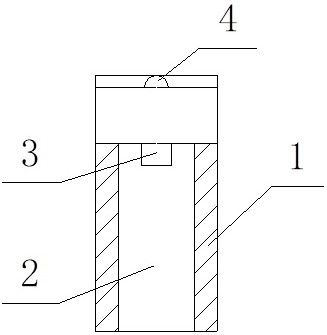
[0036] Such as figure 1 , figure 2 and image 3 As shown, the orientable scanning device provided in this embodiment for obtaining the real-time position of the implant drill includes a sleeve 1, and a vertical blind hole 2 is opened in the center of the bottom of the sleeve 1, and the blind hole 2 is connected with the sleeve. The barrel 1 is set coaxially, and the diameter of the blind hole 2 matches the drill pin, that is, after the drill pin is inserted into the blind hole 2, the drill pin and the blind hole 2 are in clearance fit, and the top side of the blind hole 2 has a penetrating sleeve 1 the visible window 3 on the side wall, the top of the sleeve 1 is provided with a pointing structure 4 composed of two cross-shaped pointers, the center line of the pointing structure 4 coincides with the axis of the sleeve 1, and the pointing structure One of the pointers of 4 is aligned with visible window 3.
[0037] This embodiment also provides a scanning method using the a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More