

A method for fast reset of robot attitude
A technology of robots and robot bodies, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems such as difficult recovery and abnormal shutdown, and achieve the effect of improving work efficiency and reducing shutdown recovery time.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
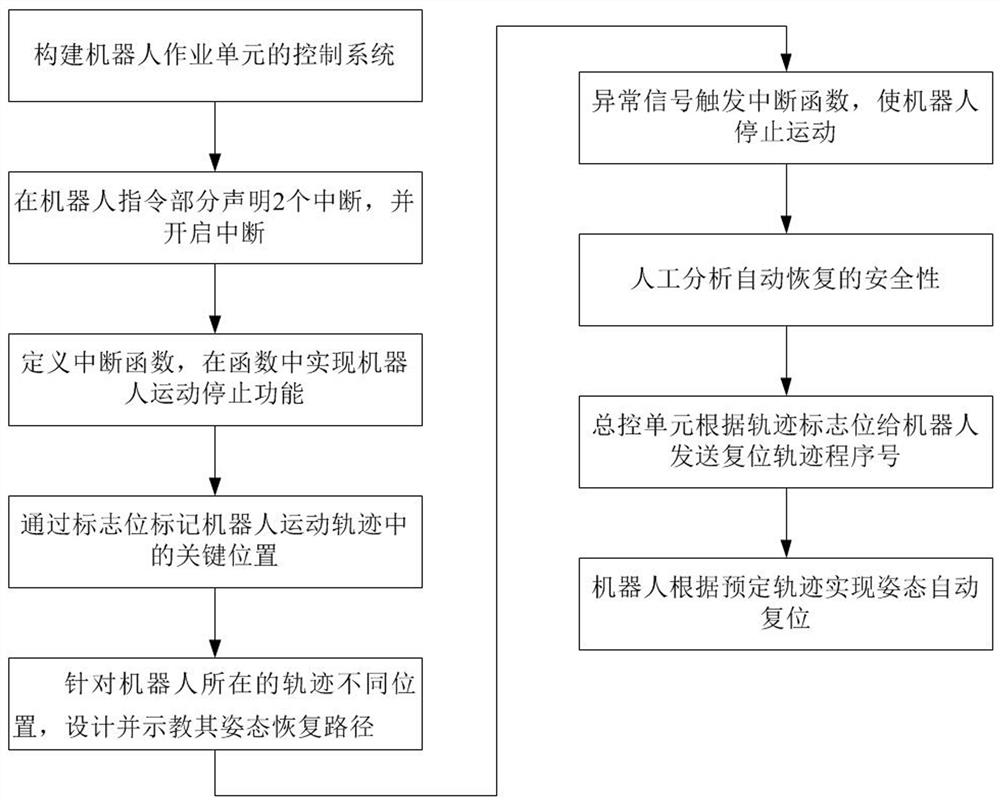
[0037] This embodiment provides a method for quickly resetting the attitude of a robot. The specific process is shown in 1, including the following steps:
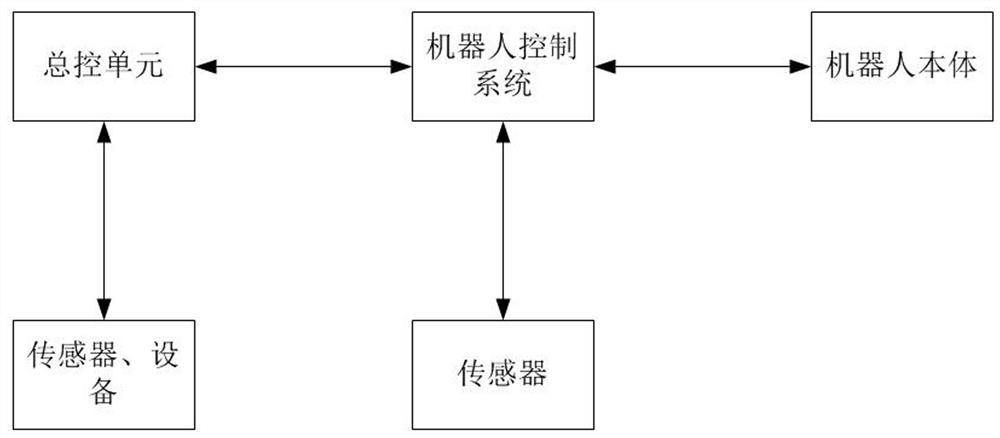
[0038] (1) Construct the control system of the robot operation unit, the control system of the robot operation unit includes a master control unit, a robot control system and a robot body, such as figure 2 shown;
[0039] (2) Declare the interrupt service in the robot command part of the robot control system, and enable the interrupt service;
[0040] (3) Define the interrupt service function;
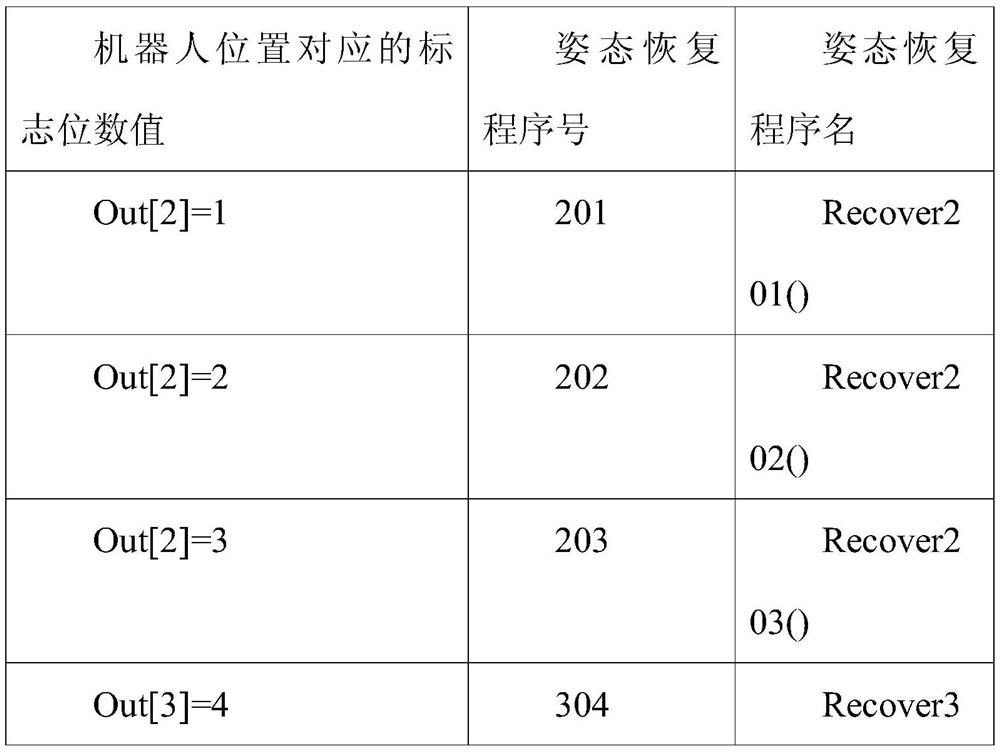
[0041] (4) mark the key position in the robot motion trajectory by the flag position;
[0042] (5) According to different positions of the robot's trajectory, design and teach its attitude recovery path;
[0043] (6) When the robot is put into application, if an abnormal signal is obtained, an interrupt function is triggered to stop the robot;
[0044] (7) When the robot stops working, manually intervene to judge whether the s...
Embodiment 2
[0048]On the basis of the foregoing embodiments, the present embodiment further defines step (2). In said step (2), there are two interrupt services declared in the robot instruction part, and the signal of the first interrupt service comes from the master control unit. The signal of the second interrupt service comes from the internal variables of the robot. The interrupt service is a function of the robot control system, which can conditionally interrupt the currently moving program and jump to the specified interrupt service program. Other parts of this embodiment are the same as those of the foregoing embodiment, and will not be repeated here.
Embodiment 3
[0050] On the basis of the foregoing embodiments, this embodiment further defines step (3). In said step (3), the defined interrupt service function includes two, specifically the first interrupt service function that provides the first interrupt service, And the second interrupt service function that provides the second interrupt service; the specific definition function of the interrupt service function includes:
[0051] Stop the movement of the current robot;
[0052] Restore the robot control system to the state where it can receive the new robot motion trajectory program number, and prepare for receiving the robot posture recovery trajectory program number;
[0053] Send the interrupt stop signal to the master control unit to inform the master control unit that the interrupt program has been executed. Other parts of this embodiment are the same as those of the foregoing embodiment, and will not be repeated here.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More