

Parking device for robot
A robot and mounting plate technology, which is applied in the field of robot parking devices, can solve the problems of difficult to balance the carrying capacity of the chassis, the large walking space, and the large size of the base, so as to achieve convenient obstacle avoidance and traffic, high carrying capacity, Good shock absorption effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
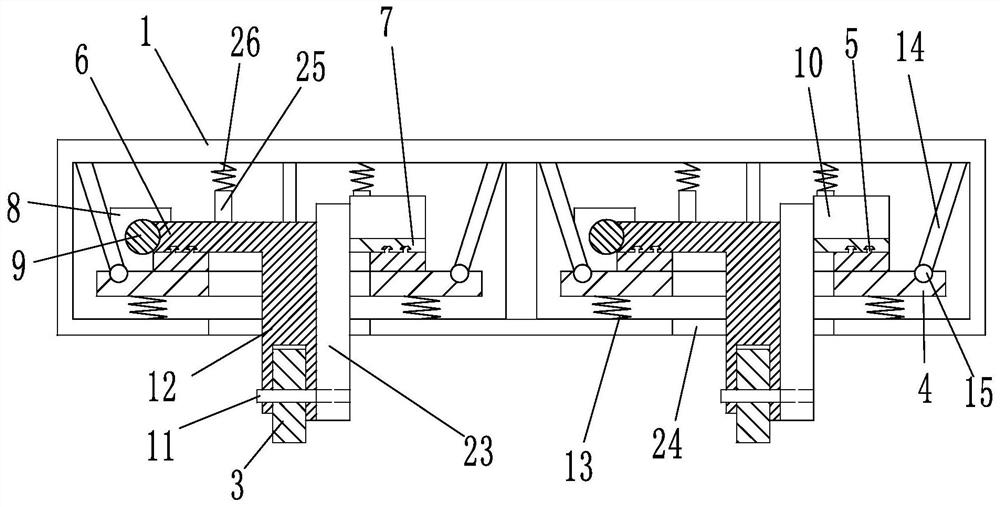
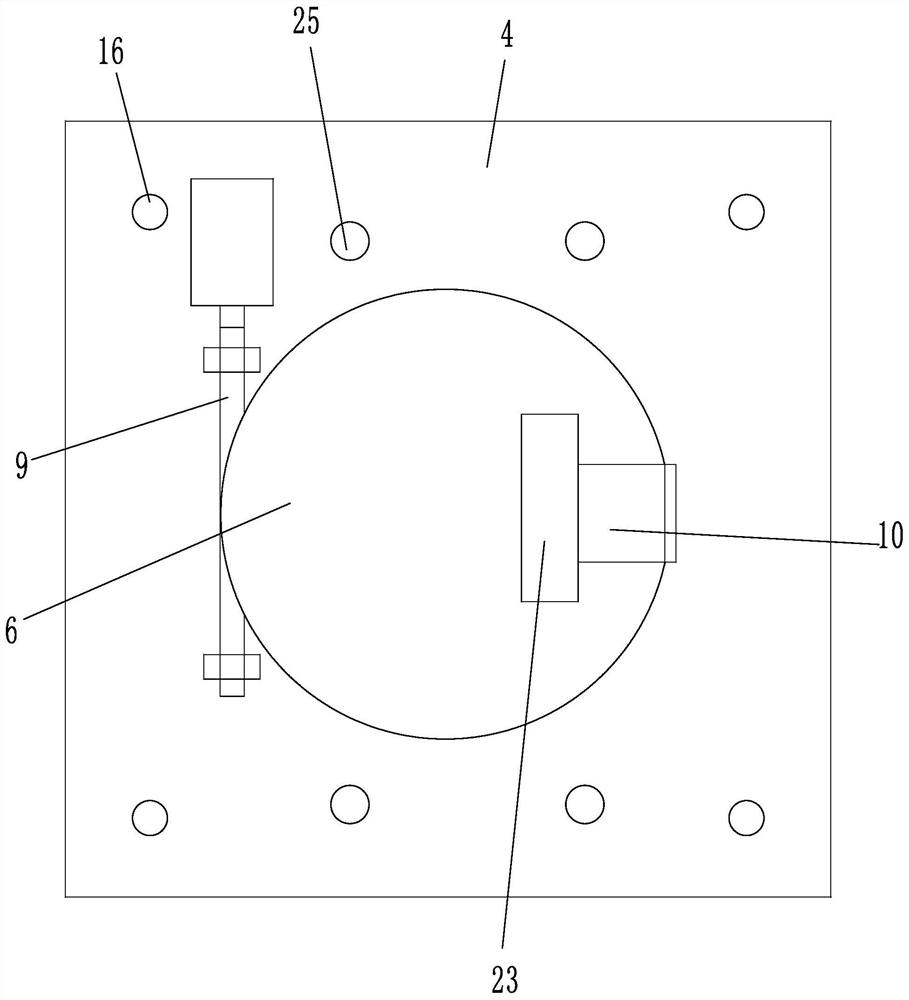
[0029] Such as figure 1 and image 3As shown, a parking device for a robot is characterized in that it includes a chassis, four driving wheels 3 are arranged on the underside of the chassis, and the four driving wheels 3 are located at the four corners of the chassis, the chassis includes a frame 1, and the frame 1 is a cuboid structure, Frame 1 includes upper and lower frame plates, a cavity is formed between the two frame plates, the edges of the two frame plates are connected by side plates, reinforcing ribs or beams can be set on the lower side of the upper frame plate to improve the load-bearing capacity of the frame plate . A support column is provided between the upper frame plate and the lower frame plate. A mounting plate 4 is arranged in the frame 1, and an annular guide rail 5 is arranged on the mounting plate 4, and the annular guide rail 5 is circular. A slider 6 and a motor base 7 are slid on the annular guide rail 5, and the two ends of the slider 6 are synch...
Embodiment 2
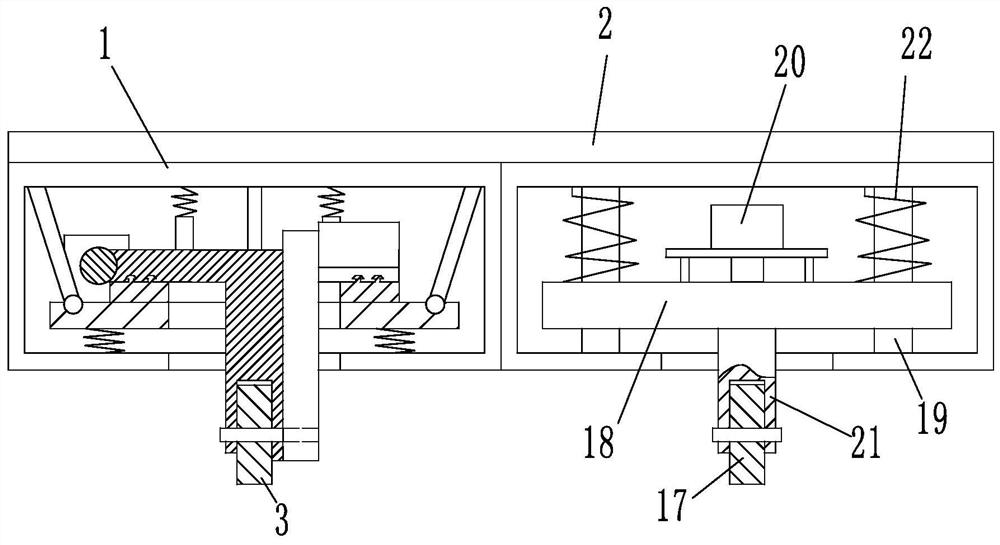
[0032] A robot parking device, such as figure 2 As shown, the shape of the chassis is a cuboid. The difference between embodiment 2 and embodiment 1 is that there are three driving wheels 3, two of which are arranged on a diagonal line on the lower side of the chassis, and the lower side of the chassis A guide wheel 17 and another driving wheel 3 are arranged on the other diagonal, that is, image 3 One of the four drive wheels 3 shown is replaced by a guide wheel 17 . The structure and size of guide wheel 17 are identical with driving wheel 3. A lifting plate 18 is arranged in the frame 1, and a rotating motor 20 is fixedly arranged on the lifting plate 18. The rotating motor 20 is connected with a rotary shaft 21, and the rotary shaft 21 is connected with the lifting plate 18 in rotation. The wheel 17 is arranged in the open slot through bearing rotation, and the frame 1 is provided with a vertically arranged lifting shaft 19, and the lifting plate 18 is slidably arranged...
Embodiment 3
[0035] A robot parking device, such as Figure 7 As shown, the difference between Embodiment 3 and Embodiment 1 is that the ring guide rail 5 is arranged on the underside of the mounting plate 4, and the ring guide rail 5 is arranged downward, so that the power assembly, the slider 6 and the motor seat 7 are also arranged in the ring On the lower side of the slide rail, after the chassis is formed, the annular guide rail 5 and the slide block 6 act under pressure, which has higher stability.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More