ESDF map construction method based on light field imaging
A technology for map construction and light field imaging, which is applied in the field of image guidance and can solve the problems of large size, barrel distortion, and heavy weight of binocular cameras.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] Now in conjunction with embodiment, accompanying drawing, the present invention will be further described:
[0028] To achieve the above object, the present invention adopts the following technical solutions to achieve:
[0029] A kind of ESDF map acquisition method design based on light field imaging, comprising the following steps:
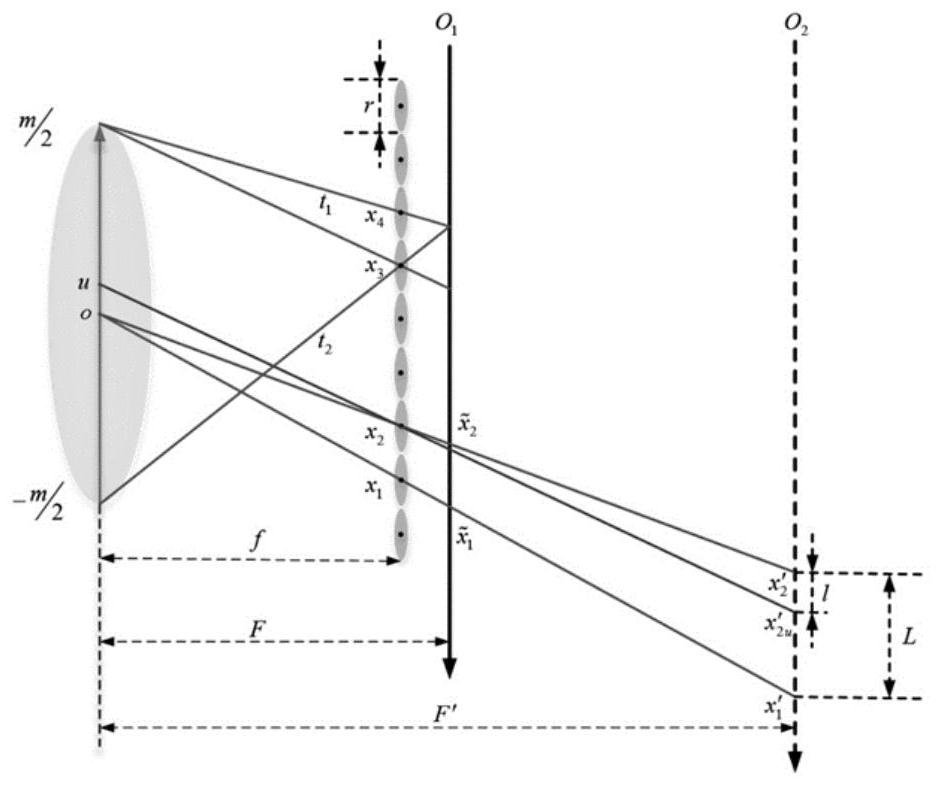
[0030] Step 1. Construct and calculate the expression of the refocusing coefficient α based on the structural refocusing model of the light field camera.
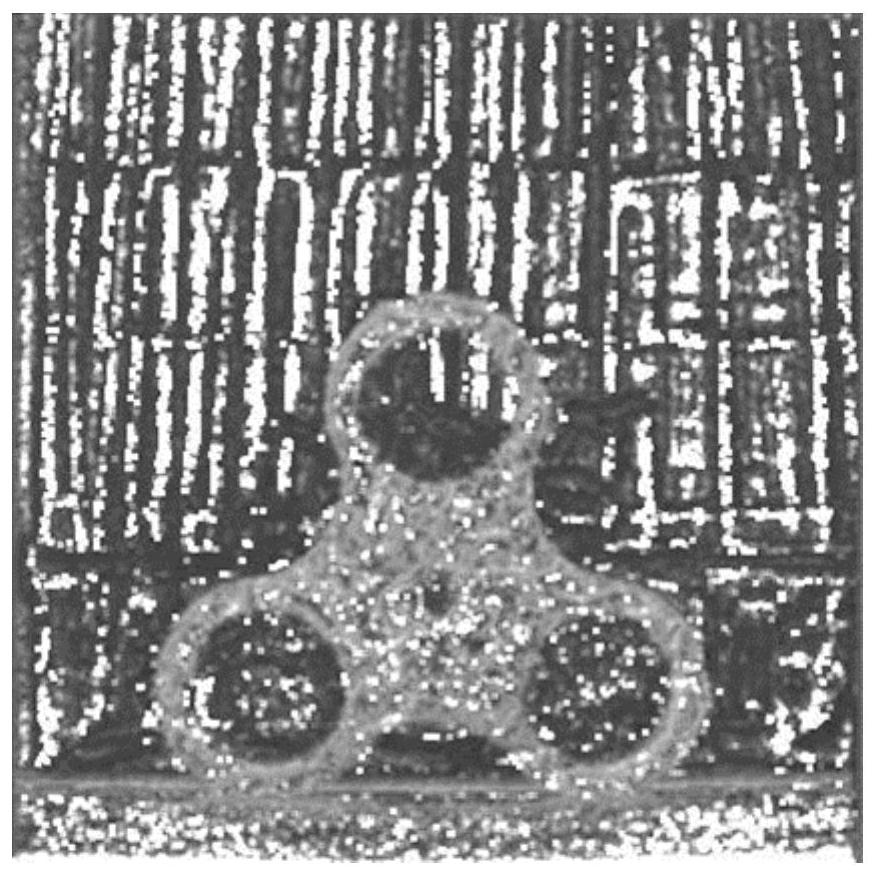
[0031] Step 2. Depth image preliminary extraction. Use the Canny operator to extract the edge of the image, calculate whether there is occlusion in the pixels on each edge, segment the area with the same angle area to achieve depth unity, and extract the preliminary depth image by traversing the refocusing coefficient.
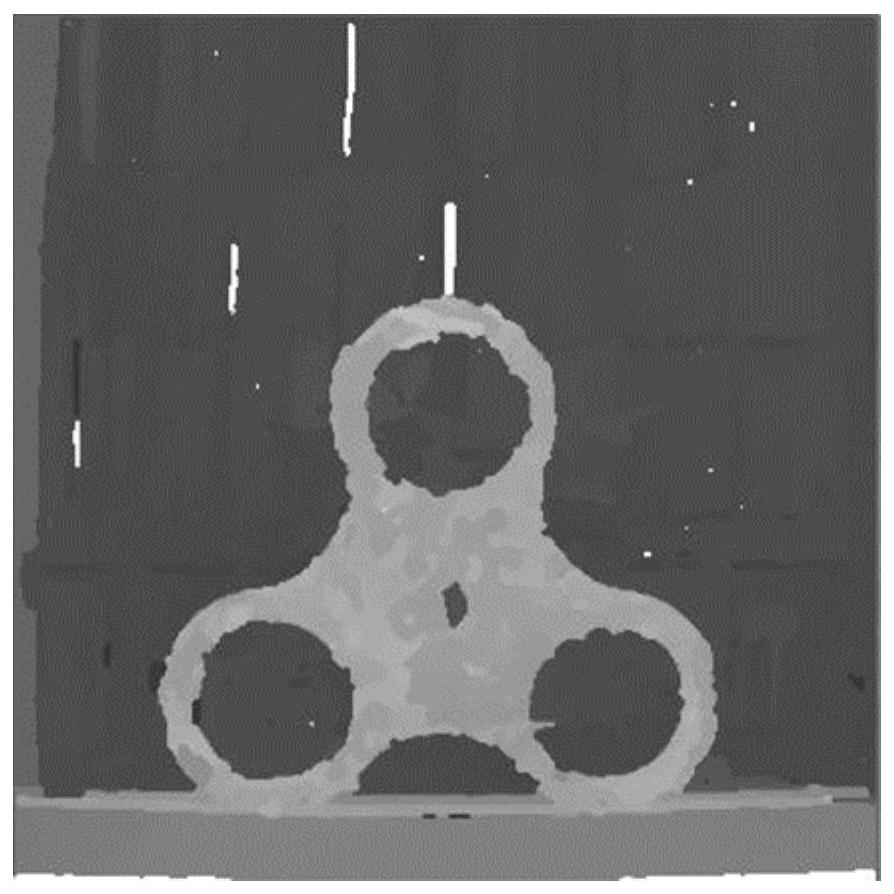
[0032] Step 3. Deep image optimization. Construct occluder clues according to the three evaluation indicators of gradient, variance, and mean, and optimize the edge...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com