Humanoid robot action system based on human body posture control and control method
A humanoid robot, human body posture technology, applied in the direction of program control manipulators, manipulators, manufacturing tools, etc., can solve problems such as troublesome preparations, achieve low environmental and equipment requirements, strong operability, and improve teaching efficiency.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0075] The present invention is described in detail below in conjunction with accompanying drawing:
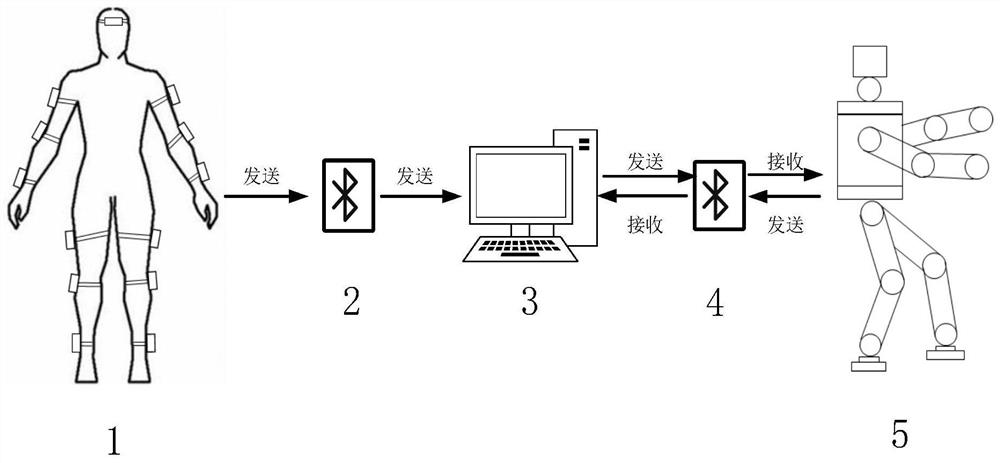
[0076] refer to figure 1 , a kind of humanoid robot action system based on human body posture control according to the present invention includes an operator, a host computer, and a robot body. The data transmission between the upper computer and the robot directly uses the Bluetooth communication module for data transmission.
[0077] refer to figure 2 According to the present invention, the position of the gyroscope fixed on the human body of a humanoid robot action system based on human body posture control includes the forehead of the human body, the outer side of the left and right shoulder joints, the outer side of the elbow joint and the outer side of the wrist joint of the upper body, and the outer side of the lower body. On the outer sides of the left and right hip joints, the outer sides of the knee joints, and the outer sides of the ankle joints, the number of gy...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More