

Automatic exposure adjusting method for binocular camera of fire-fighting robot
A fire-fighting robot and binocular camera technology, applied in the field of binocular camera automatic exposure adjustment, can solve the problems of low camera exposure adjustment efficiency, inappropriate binocular image brightness adjustment, and inability to adapt to complex fire environments
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment 1
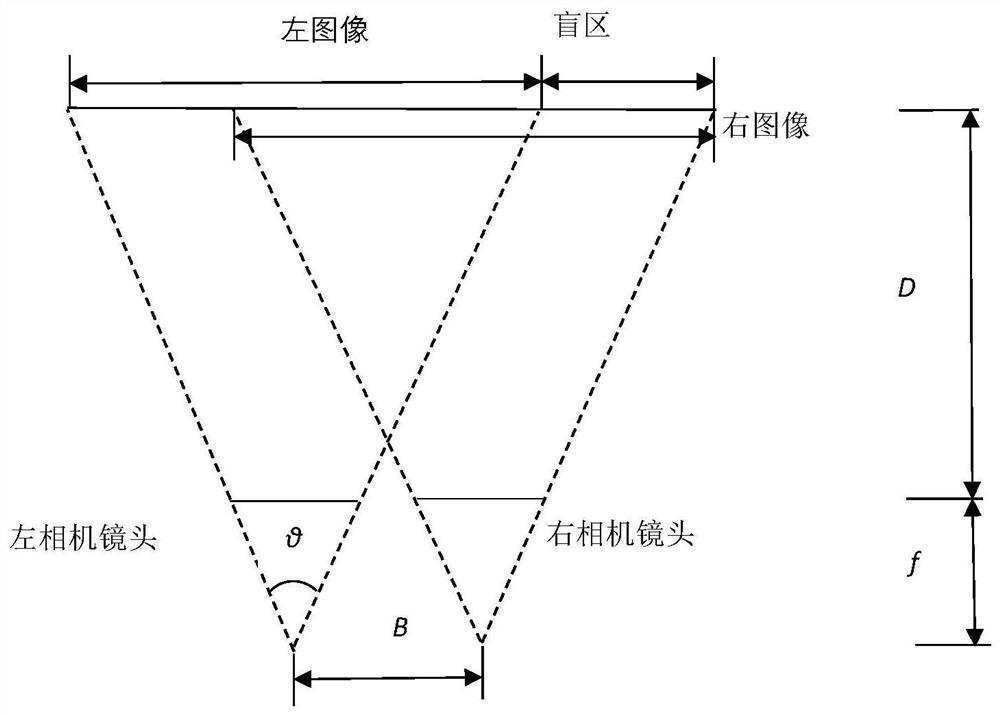
[0065] The effective information content analysis of the binocular image takes into account the imaging principle of the binocular image, and only performs information analysis on the area related to the stereo matching calculation. The imaging principle of the binocular image is as follows: figure 1 As shown, the information in the blind area is not calculated, so the calculation formula of the effective mutual information entropy H(Q1,Q2) of the binocular image is as follows:
[0066]
[0067]Among them, Q1 and Q2 are the binocular left and right images respectively, Ea is the effective information calculation area of the image, D is the ranging depth range, f is the focal length of the camera, θ is the imaging angle of the camera lens, and B is the baseline distance of the binocular camera.
[0068] The quality analysis factor of the binocular image stereo matching disparity map is:
[0069] |dispR[X-d±1]-dispL[X±1]|
[0070] Among them, dispR and dispL are the disp...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More