

Workpiece position alignment method using point cloud registration technology and three-dimensional reconstruction technology
A technology of 3D reconstruction and point cloud registration, which is applied in the field of optical measurement, can solve problems such as complex working environment, inability to perceive working conditions, and lack of environmental changes
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
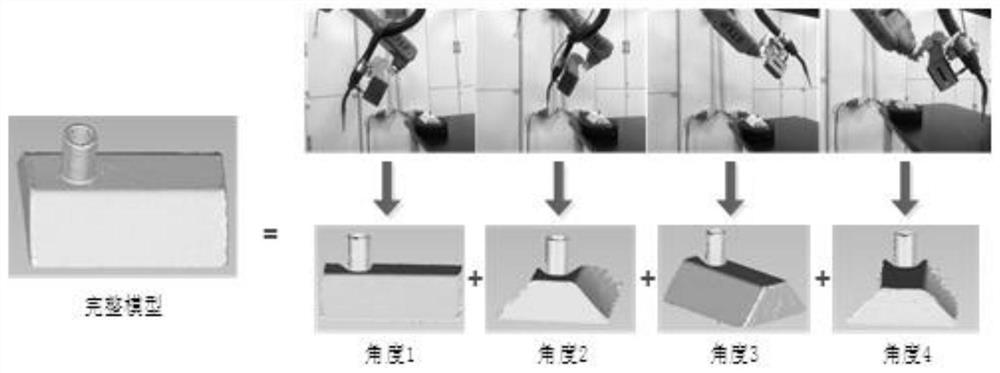
[0095] The invention provides a workpiece position alignment method using point cloud registration technology and three-dimensional reconstruction technology. Firstly, preprocessing such as denoising and simplification is performed on the collected point cloud; secondly, the mechanical arm is used as a moving device to assist in completing the reference model of the workpiece. 3D reconstruction; finally, the relevant point cloud registration algorithm is carried out to obtain the pose transformation matrix of the physical model and the reference model, so as to align the physical model and the reference model and complete the position correction of the weldment. In order to make the purpose, technical solutions and advantages of the present invention clearer, the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments.
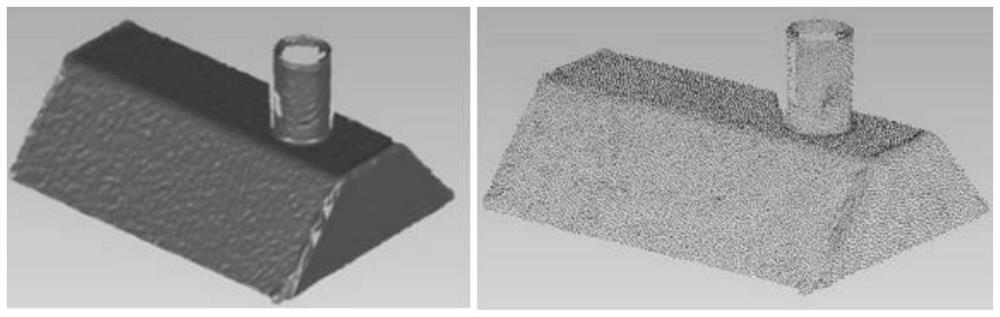
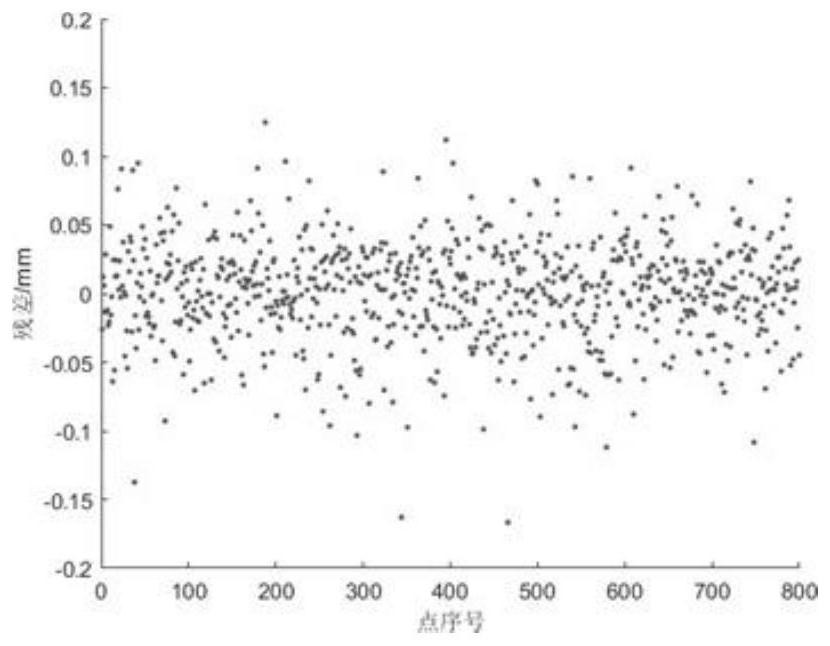
[0096] S1 preprocesses the obtained point cloud data to obtain the point cloud model
[0097...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More