

Unmanned aerial vehicle, control method and device thereof, remote control terminal and unmanned aerial vehicle system
A technology of remote control terminal and control method, applied in the field of unmanned aerial vehicle, can solve the problems of lack of control experience, bombing, loss of control, etc., and achieve the effect of reducing the difficulty of control and improving the flight experience
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0069] Embodiment 1 and Embodiment 2 will describe in detail the implementation process of the UAV control method according to the embodiment of the present application from the side of the UAV and the side of the remote control terminal respectively.
[0070] Embodiment one
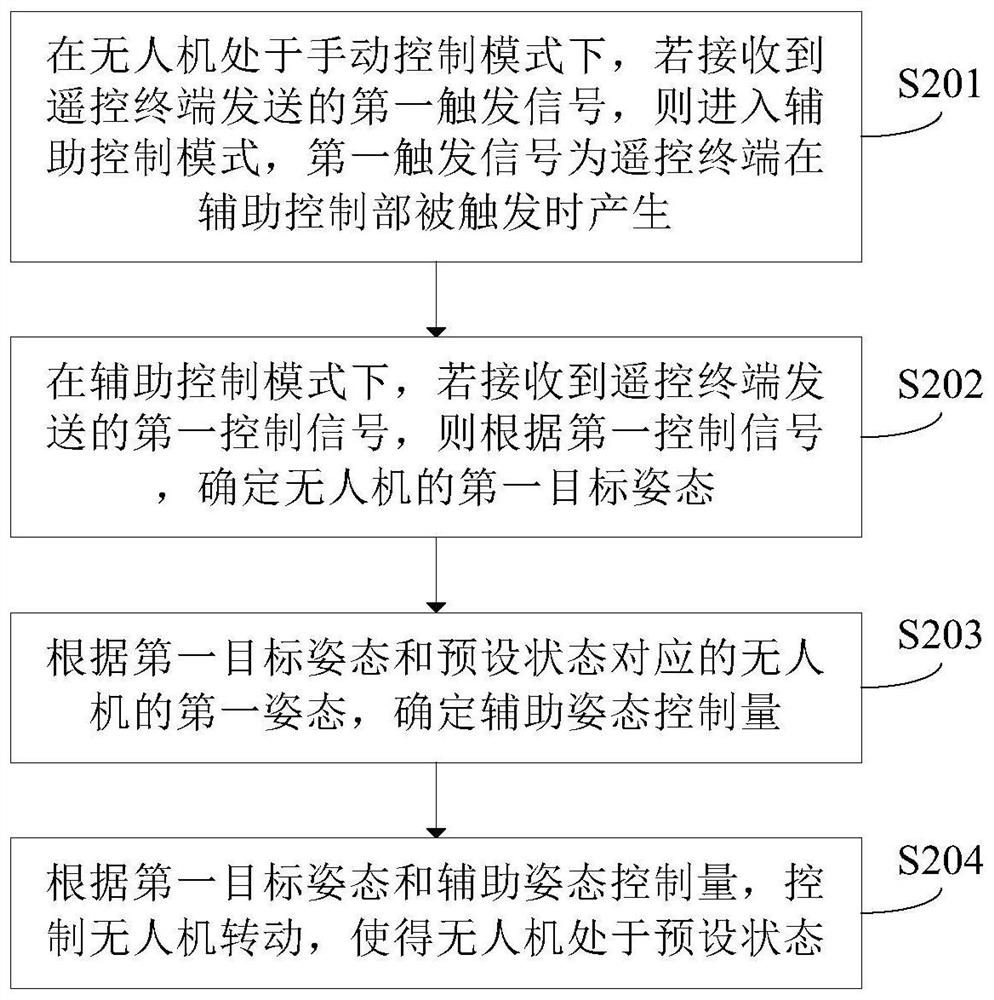
[0071] figure 2 It is a schematic flow chart of the UAV control method on the UAV side in an embodiment of the present application; the execution subject of the UAV control method in this embodiment can be the flight controller of the UAV, or it can be Other controllers installed on the drone. In this embodiment, it is taken that the execution subject of the control method of the UAV is the flight controller as an example. See figure 2 , The method for controlling a drone in this embodiment may include S201-S204.
[0072] Wherein, in S201, when the UAV is in the manual control mode, if it receives the first trigger signal sent by the remote control terminal, it enters the auxiliary control mode. Th...
Embodiment 2
[0109] Figure 5 It is a schematic diagram of the method flow of the control method of the drone in an embodiment of the present application on the remote control terminal side; other controllers on the terminal. See Figure 5 , the method for controlling the drone in this embodiment may include S501-S503.
[0110] Wherein, in S501, a first user instruction is obtained, and the first user instruction is used to instruct switching the auxiliary control unit from a non-triggered state to a triggered state.
[0111] The first user instruction may include an operation instruction for the user to operate (such as single click, double click or long press) the auxiliary control part when the auxiliary control device is in a non-triggered state. Exemplarily, when the auxiliary control device is in the non-triggering state, the user clicks the auxiliary control part, and the triggering auxiliary control device is switched from the non-triggering state to the triggering state.
[01...
Embodiment 3
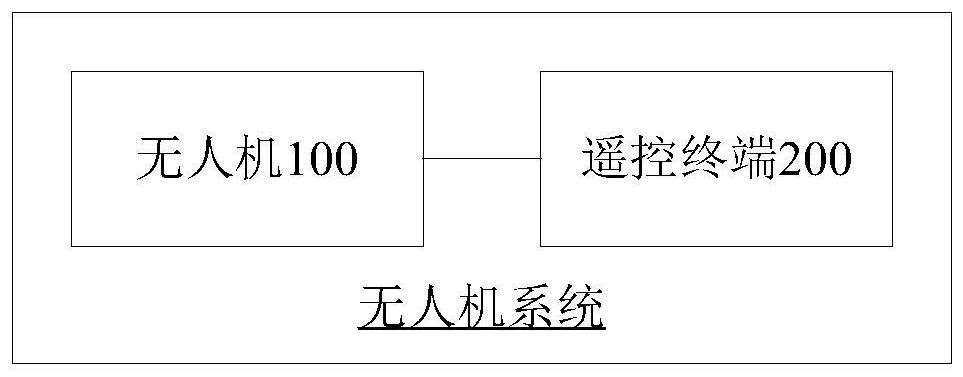
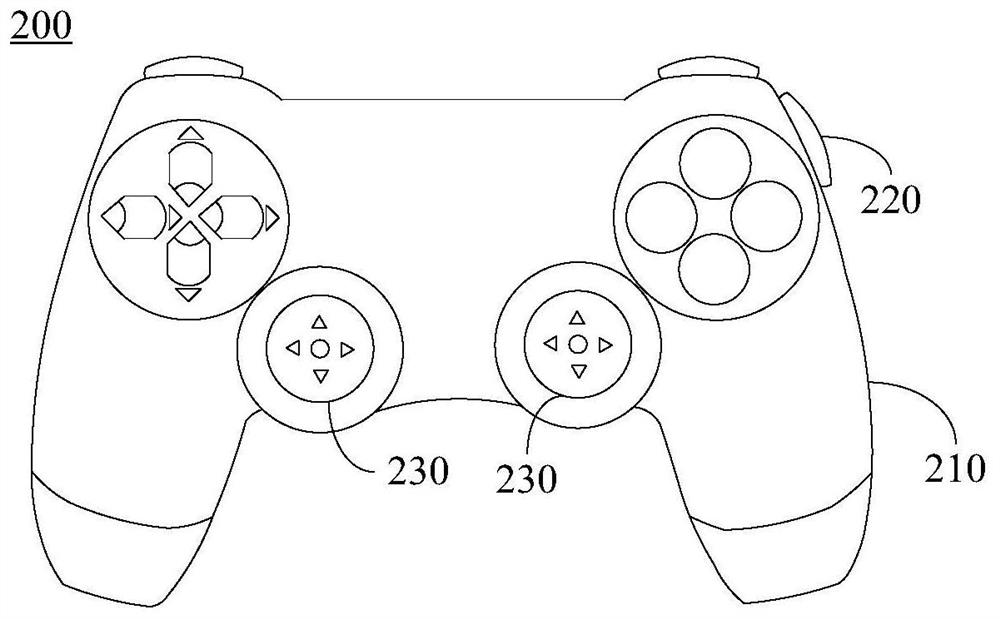
[0135] The embodiment of this application provides an unmanned aerial vehicle system, please refer to Figure 1A and Figure 1B , the drone system may include a drone 100 and a remote control terminal 200 communicatively connected to the drone 100 , and the remote control terminal 200 may include an auxiliary control unit 220 .
[0136] Wherein, the remote control terminal 200 is configured to switch the auxiliary control unit 220 from the non-triggering state to the triggering state when acquiring the first user instruction indicating to switch the auxiliary control unit 220 from the non-triggering state to the triggering state, and generate the first trigger Signal; sending a first trigger signal to the UAV 100 .
[0137] The UAV 100 is used to enter the auxiliary control mode if the UAV 100 is in the manual control mode and receives the first trigger signal sent by the remote control terminal 200; The first control signal, then according to the first control signal, determ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More