Positioning calibration method for construction working machines and positioning calibration controller thereof
A technology for working machinery and positioning correction, which is applied to mechanically driven excavators/dredgers, satellite radio beacon positioning systems, instruments, etc. Eliminate pasting errors and their accumulation, save input time, and reduce the effect of pasting parts
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
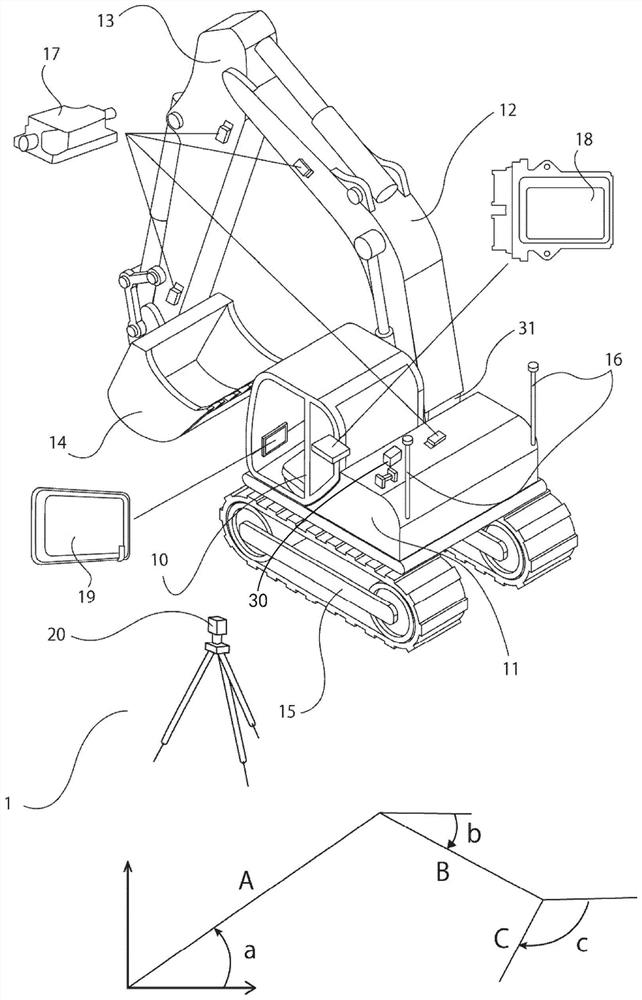
[0137] First, a rotational measurement of the driven work tool is performed. This is an operation to continue setting and correcting the body coordinate system. Such as Figure 7 As shown, for example, a prism is held at the bucket tip 25 and the World Geodetic System coordinates 3 of the tip are measured by a total station (TS) 6 . Measurements are taken from the side of the backhoe. Since only the lateral position is measured from the TS at the same depth, stabilization of accuracy can be expected.
[0138] ·Such as Figure 8 As shown, the boom 12 and the arm 13 are fixed, and only the bucket 14 is rotated, and the 2P of the bucket tip 25 is measured in the world geodetic system i .
[0139] • The arm 13 is rotated, and the above operation is performed. There are four measurement points in total.
[0140] • Next, the boom 12 is rotated, and the above operation is repeated. There are a total of eight measurement points.
[0141] ·For boom 12, arm 13, bucket 14 at the...
Embodiment 2
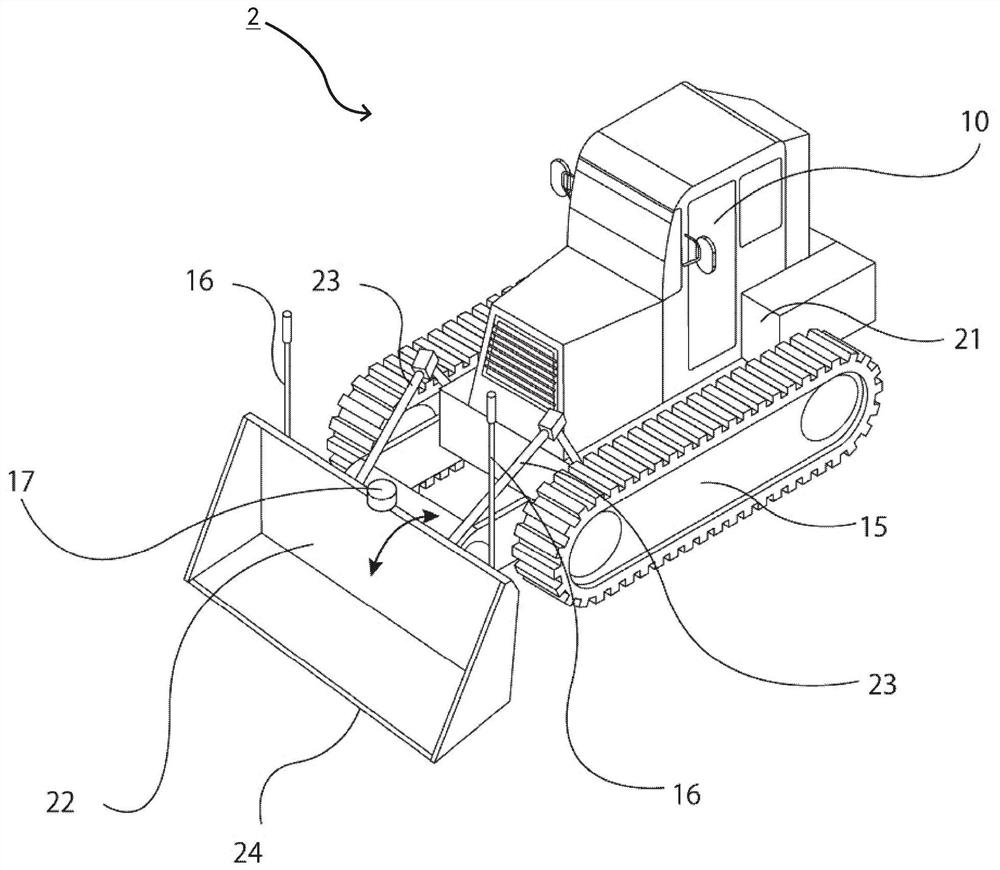
[0157] Next, an example of a bulldozer will be described.
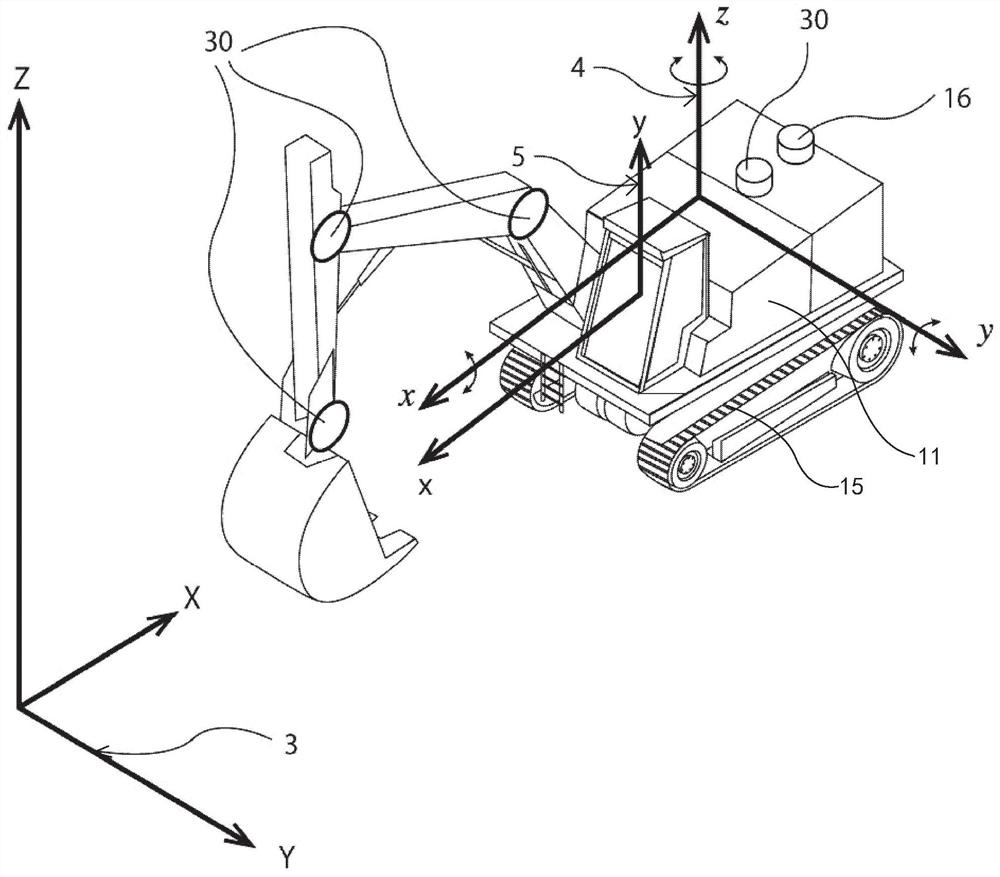
[0158] Figure 4 It is a three-dimensional conceptual diagram showing the form of the coordinate system of the bulldozer as a whole in the positioning correction method of the construction work machine and its positioning correction controller according to an embodiment of the present invention. As shown in this figure, a group of GNSS receivers 16 and antennas are arranged on the body (as shown in this figure, the GNSS receivers 16 and antennas may also be integrated). An IMU (Inertial Measurement Unit, inertial measurement unit) 30 composed of a three-axis acceleration sensor and a three-axis gyro sensor is provided on the body. These are placed on the upper body main body 21 on the body.
[0159] Such as Figure 4 As shown, the same IMU is set on the blade (dozing blade) 22 . The operation structure of the scraper is based on a rotating shaft near the center of the body, and the frame (thrust arm) 23 is rotated...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More