

Industrial mechanical arm motion planning method based on reinforcement learning algorithm
A technology of reinforcement learning and motion planning, applied in the direction of manipulators, program control manipulators, claw arms, etc., can solve problems such as falling into local optimum, and achieve the effect of improving adaptability, good environmental adaptability and stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0067] Below in conjunction with accompanying drawing and specific embodiment the present invention is described in further detail:
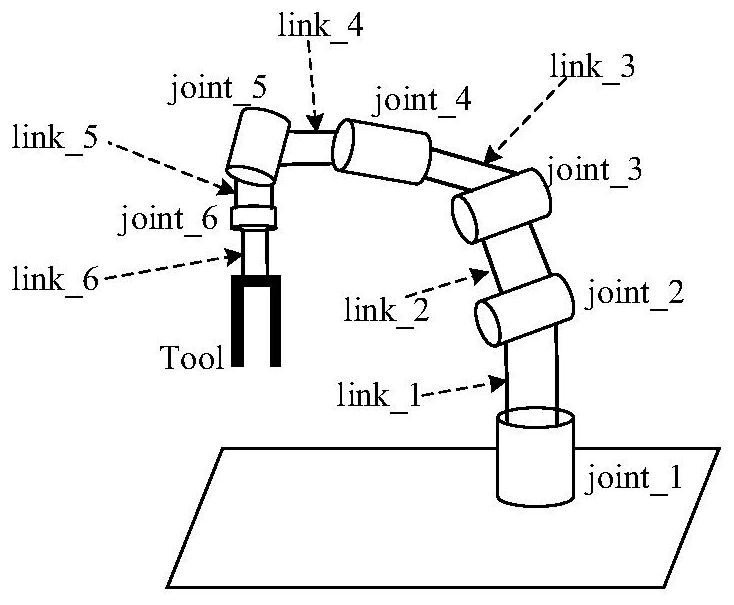
[0068] Robotic arms are commonly used machinery and equipment in industrial production. The six-degree-of-freedom full-rotation joint manipulator is a relatively common manipulator structure in the actual production environment. This type of manipulator can basically meet the needs of general industrial production. Such as figure 1 It is a classic industrial mechanical watch structure. Six of the joints are rotary joints and the axes of the rear three axes intersect at one point. This type of structure has strong kinematic solvability. Moreover, this kind of mechanical arm structure can basically meet the positioning and grasping tasks in three-dimensional space in industrial production. Therefore, this kind of mechanical arm with classic structure has been widely used in industrial production.
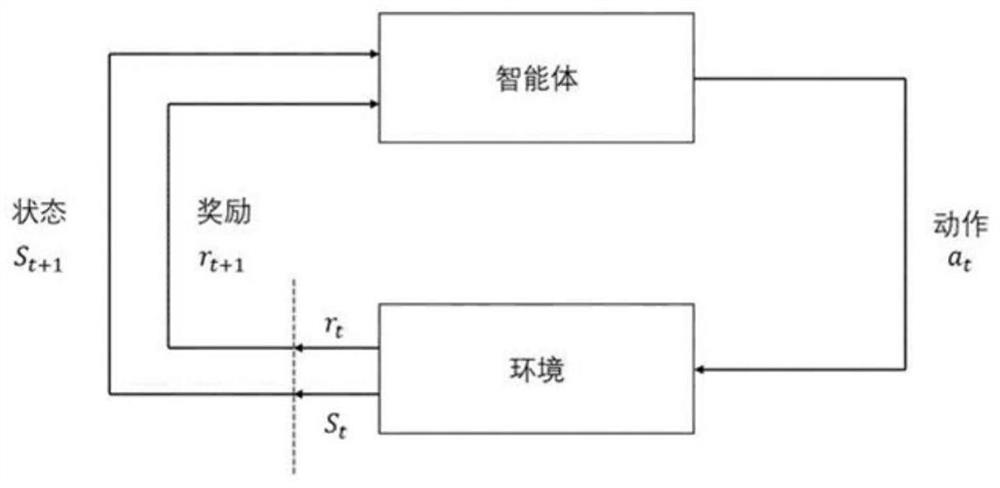
[0069] Such as figure 2 As shown, reinforc...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More