

Multi-robot relative positioning method based on multi-sensor fusion
A multi-sensor fusion and multi-robot technology, applied in the field of UAV perception and positioning research, can solve problems such as distance, improve positioning accuracy, improve accuracy and calculation speed, and accelerate the effect of observation update frequency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0036] Further, the drawings are now further described with reference to the present invention:
[0037] It is an object of the present invention to design a mutual positioning method based on a multi-sensor fusion. The configuration perception of the multi-drone consensus is intended to provide a stamped information for the control module.
[0038] In order to achieve the above object, the technical solution used in the present invention includes the following steps:
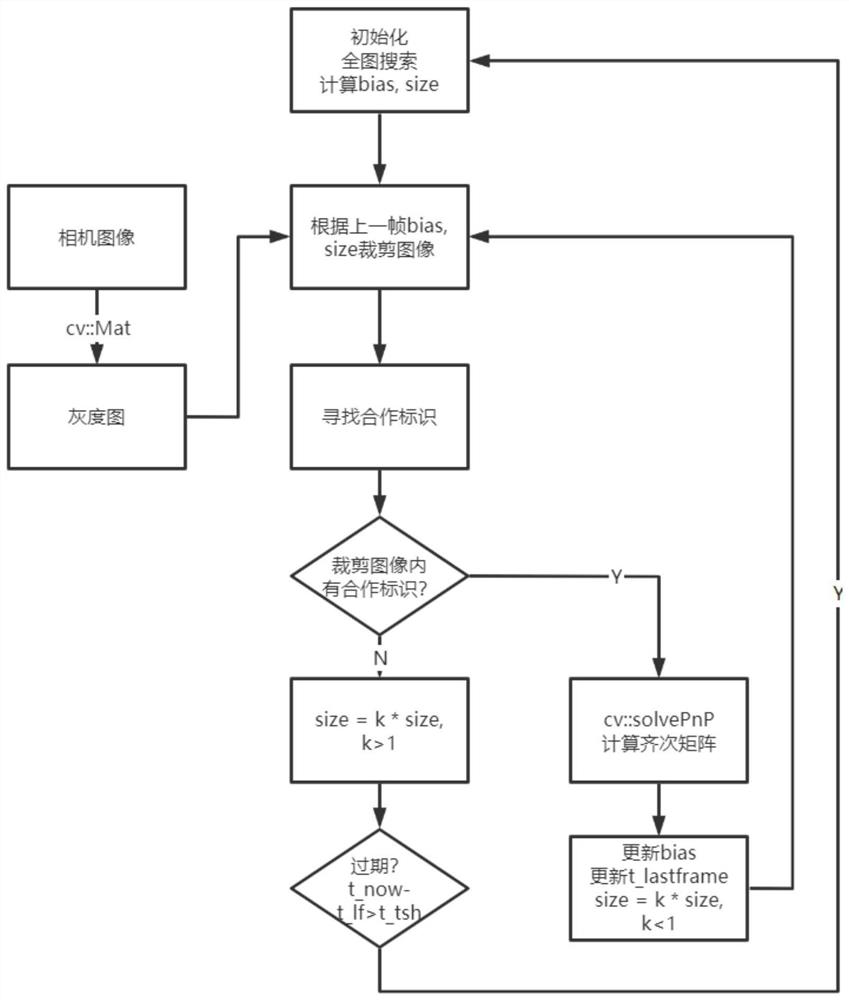
[0039] 1) Single-machine visual position estimate for other drones in visual visibility;
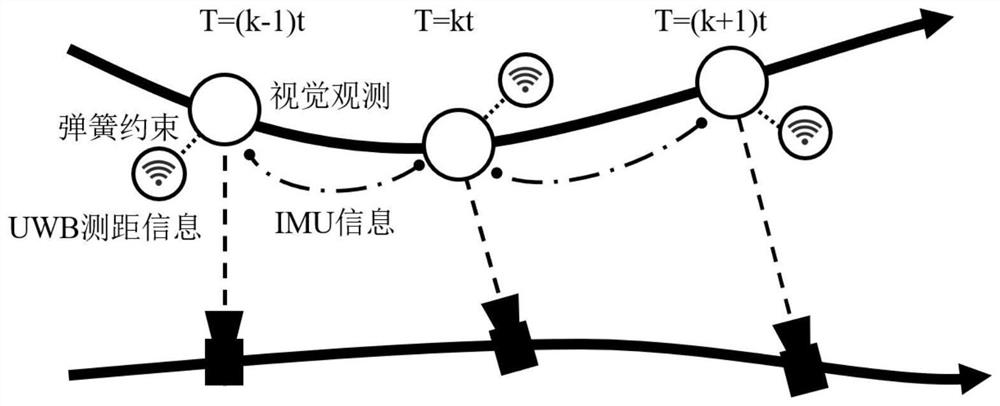
[0040] 2) IMU information and visual estimation and UWB ranging information fusion;
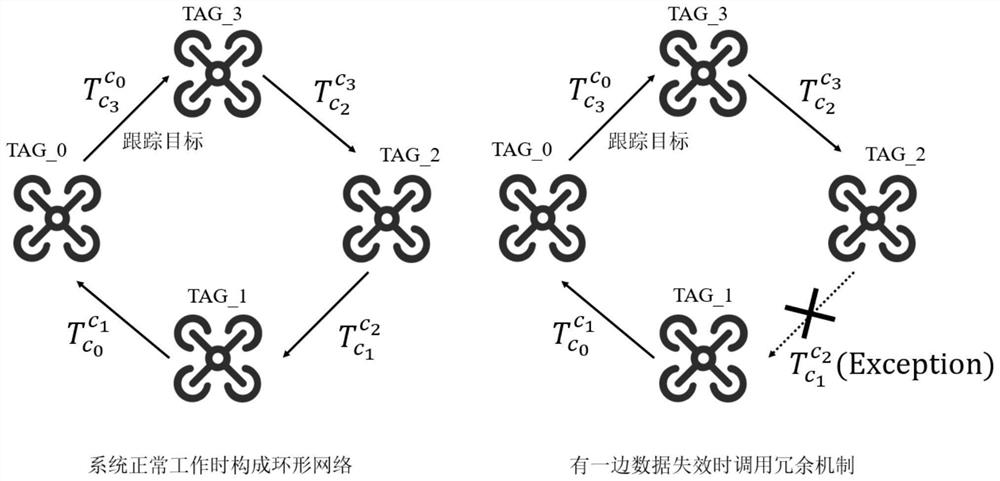
[0041] 3) Multi-machine positioning results are fused.
[0042] The step 1) estimate of the single machine to other drones:
[0043] 1.1) Setting of cooperation identification: Use AprilTag as a cooperation identifier, black and white print, and the outer frame is 0.5m.
[0044] 1.2) Determine the system topology: The performance of the airb...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More