

Control system and control method for upper limb exoskeleton rehabilitation robot
A rehabilitation robot and control system technology, applied in the field of rehabilitation, can solve the problems of poor human-computer interaction and low self-adaptive adjustment ability, and achieve the effects of eliminating force errors, improving self-adaptive adjustment ability, and improving human-computer interaction ability.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
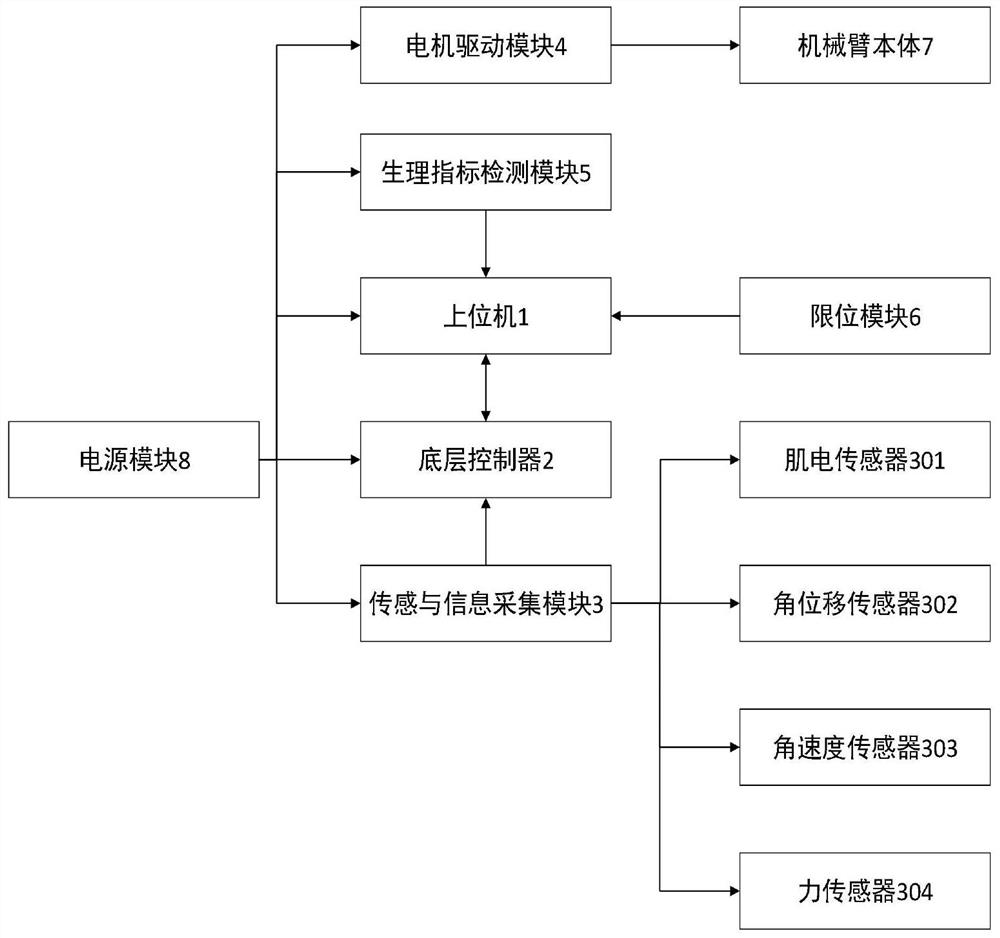
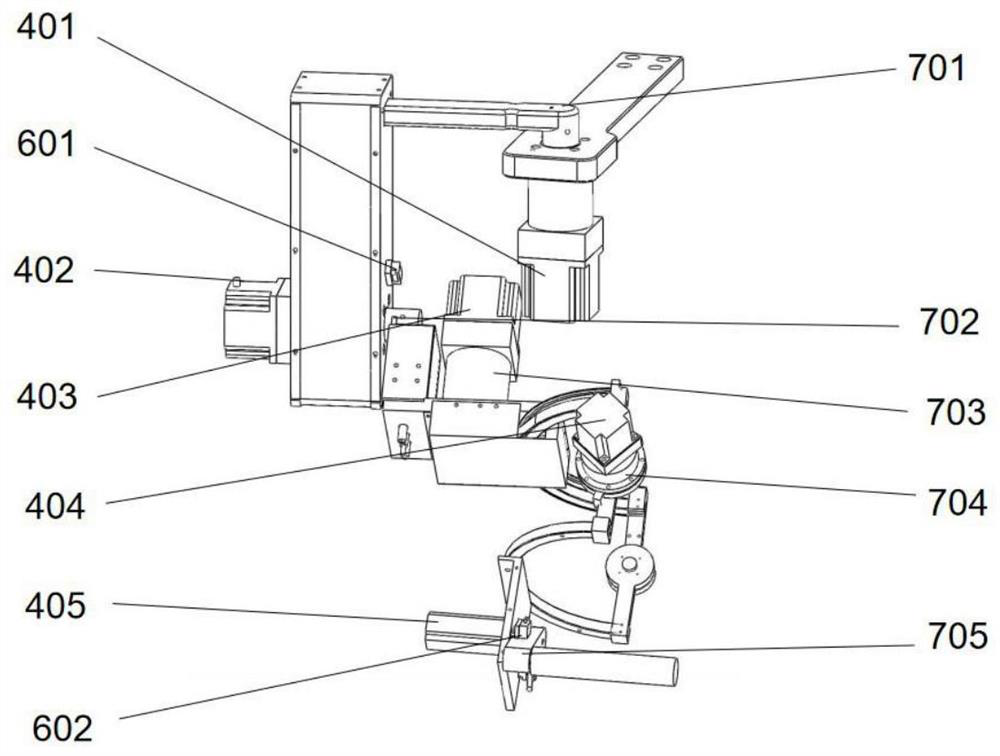
[0040] In a typical embodiment of the present invention, as Figure 1-2 As shown in the figure, an upper limb exoskeleton rehabilitation robot control system is proposed, including a host computer 1, a bottom controller 2, a sensing and information acquisition module 3, a motor drive module 4, a physiological index detection module 5, a limit module 6, a mechanical Arm body 7 and power supply module 8 .
[0041] Among them, the power supply module is respectively connected with the motor drive module, the physiological index detection module, the host computer, the bottom controller and the sensing and information collection module to provide power support to maintain the operation of the entire system.
[0042]The sensing and information acquisition module is connected with the underlying controller through the bus, so as to realize the collection and transmission of information. The underlying controller is connected with the upper computer through TCP / IP, and the two can ca...
Embodiment 2
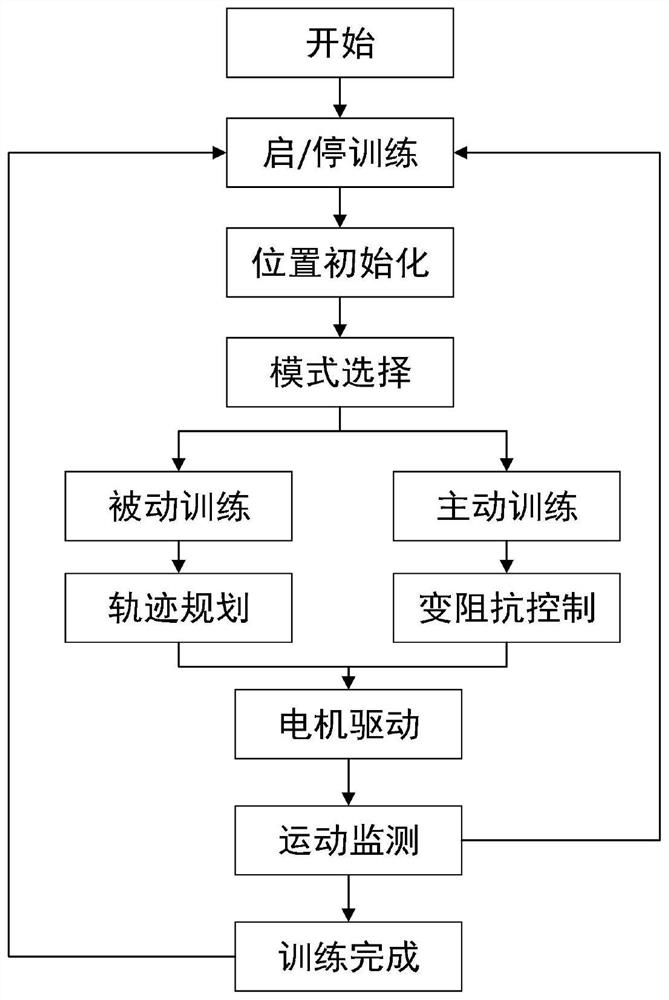
[0053] In another typical embodiment of the present application, as Figure 3-5 As shown, a control method for an upper limb exoskeleton rehabilitation robot control system is provided, as follows:
[0054] The control system selects different training modes for different recovery periods of patients, namely passive training and active training.
[0055] Passive training is carried out in the early stage of training, because in the early stage of training, the patient's affected limb has no ability to exercise at all, and can only rely on the driving of the upper limb rehabilitation robot to carry out rehabilitation training according to the planned trajectory.
[0056] Specifically, according to the characteristics of upper limb damage of hemiplegic patients, the EMG sensor was used to collect the surface electromyogram (sEMG) of the muscles of the unaffected upper limb of the patient as the control signal of the rehabilitation robot, and the feature extraction of the sEMG si...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More