

Method and device for testing perception delay performance of automatic driving vehicle
A technology for autonomous driving and test solutions, applied in the field of autonomous vehicle perception testing, can solve problems such as insufficient precision and poor execution, and achieve the effects of reducing impact, simplifying test models, and reducing background interference
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0067] Scenario A is that the object under test and the self-driving vehicle are in a static state or a relatively static state, wherein the relatively static state means that the object under test and the self-driving vehicle have the same running speed and running direction;
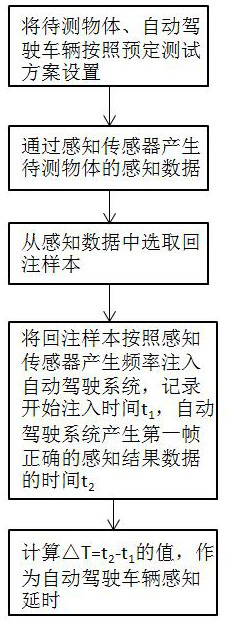
[0068] For scenario A, the method of testing the perceived delay performance of autonomous driving vehicles, such as figure 2 shown, including the following steps:
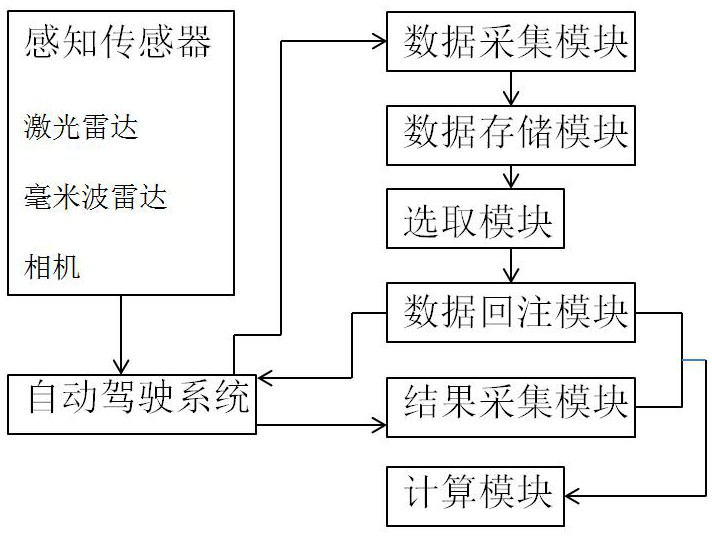
[0069] S0. The self-driving vehicle includes perceptual sensors for generating perception data, and an automatic driving system for analyzing the perceptual data and outputting perceptual results, wherein the perceptual sensors include lidar, millimeter-wave radar, camera, laser radar, and millimeter-wave radar To obtain the point cloud data of the object to be measured, the camera is used to obtain the streaming media data of the object to be measured; the perception sensor is connected to the automatic driving system of the self-driving...
Embodiment 2
[0075] Scenario B is that the object to be measured and the self-driving vehicle have parallel motion directions, and when they are in the same direction, the speed of motion is different. For the above scene, the object to be measured and the self-driving vehicle are divided into the same direction and non-same direction from the direction of motion. (Facing) Two kinds, wherein, when they are in the same direction, the speed of movement of the two is further limited to be different;
[0076] Specifically, in this embodiment: scene B is specifically set to be that the self-driving vehicle and the object to be measured are parallel to each other and moving towards each other, and the driving direction along the self-driving vehicle is set as the positive direction, and m is the predetermined moving speed of the self-driving vehicle along the positive direction , n is the predetermined moving speed of the object under test along the positive direction, n is a negative value, and ...
Embodiment 3
[0086] Scenario C is that the object to be measured and the self-driving vehicle have non-parallel motion directions, that is, there is a predetermined angle between the driving route of the object to be measured and the route of the self-driving vehicle, and the predetermined angle is not 0° or 180°;
[0087] Specifically in this embodiment: scene C is specifically set such that the predetermined angle between the self-driving vehicle and the object to be measured is 35°;
[0088] For scenario C with specific settings, the method of testing the perceived delay performance of autonomous driving vehicles, such as figure 2 shown, including the following steps:
[0089] S0. The self-driving vehicle includes perception sensors for generating perception data, and an automatic driving system for analyzing the perception data and outputting perception results, wherein the perception sensors include laser radar, millimeter wave radar, camera, and laser radar and millimeter wave radar...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More