

Bionic manipulator driving structure and driving method
A driving structure and manipulator technology, applied in manipulators, program-controlled manipulators, chucks, etc., can solve the problems of weak load capacity, poor practicability, complex structure, etc., and achieve the effects of cost reduction, increased finger load, and simple wrist structure.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
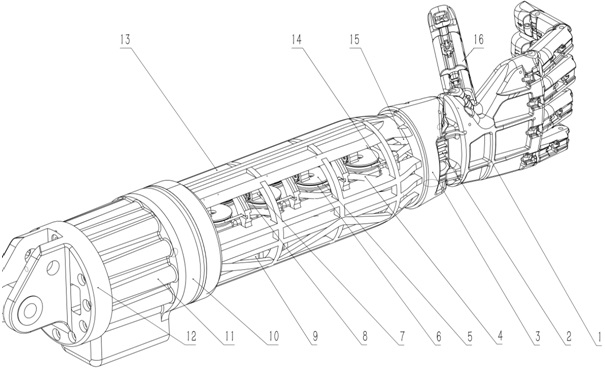
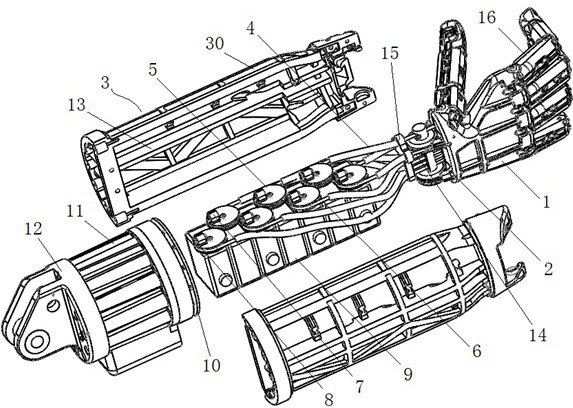
[0024] like figure 1 , 2 , a kind of bionic manipulator drive structure shown in 3, comprises five finger assemblies 16, a palm assembly 1 and forearm 3, five finger assemblies 16 connect palm assembly 1, palm assembly 1 connects forearm 3; Finger assembly 16 There is no motor in the palm assembly 1, only a traction rope pipe is provided. The forearm 3 is composed of a forearm frame 30 and an external housing. The forearm frame 30 is formed by docking two hollow skeletons, and a number of locking positions are arranged in the frame. It is used to correspondingly install the sheave and the fixed guide tube 4; the finger steering gear 5 and the wrist swing steering gear are arranged in the hollow structure of the forearm frame 30, and the finger traction rope 2 and the wrist swing traction rope 14 are all passed through the respective traction rope pipes Among them, one end of the finger traction rope 2 is connected to the knuckle of the finger end, the other end is connected t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More