Optimal hybrid H2/H-infinity robust controller design method based on genetic algorithm
A robust controller and genetic algorithm technology, applied in the field of optimal hybrid H2/H∞ robust controller design based on genetic algorithm
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
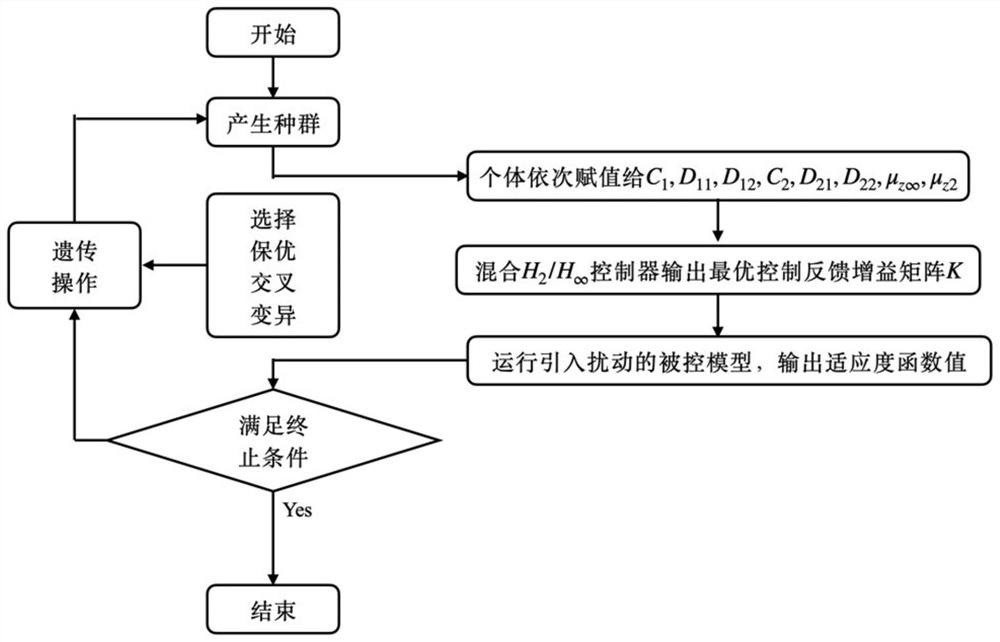
[0076] An Optimal Hybrid H Based on Genetic Algorithm 2 / H ∞ Robust controller design methods, such as figure 2 As shown, the specific steps are as follows:
[0077] (1) Based on the MATLAB platform, the initial population is generated by a genetic algorithm;
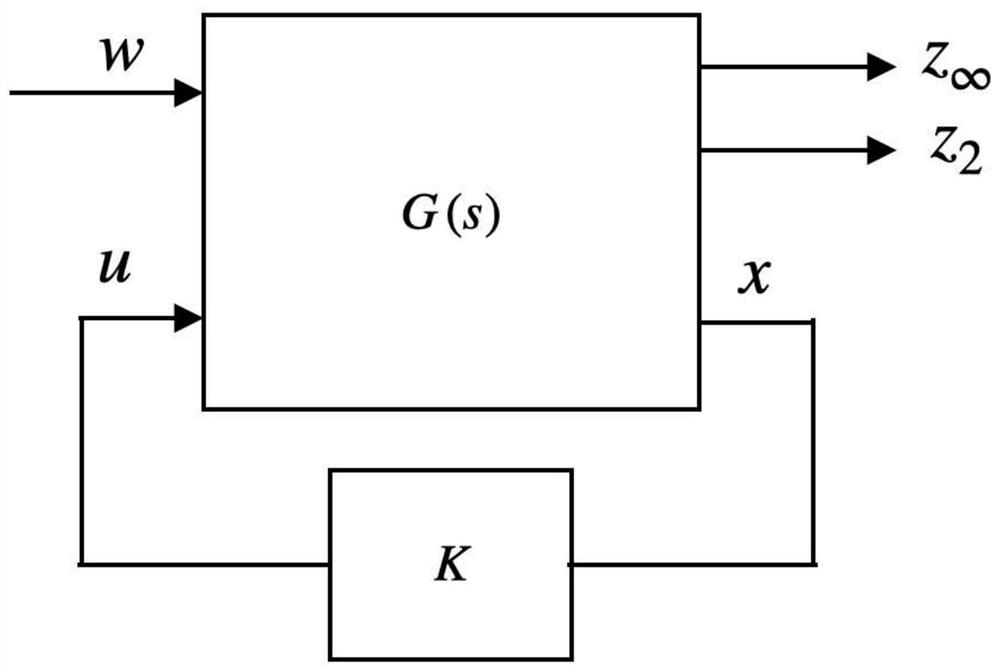
[0078] (2) For the introduced system disturbance w linear time invariant controlled system's state equation model is:
[0079]
[0080] Among them, x is the system state vector, u is the control input of the system, y is the system output, w is the external disturbance input, C y is the identity matrix I, D y1 = 0;
[0081] On this basis, introduce the system H 2 and H ∞ Robust performance evaluation signal output z ∞ ,z 2 , its state space can be described as:
[0082]
[0083] For weighting matrix C 1 ,D 11 ,D 12 , C 2 ,D 21 ,D 22 defined as:
[0084] C 2 =C 1 ;D 22 =D 12 ;D 11 =D 21 = 0;
[0085] Here, n represents the number of lines of the system state vector x, and m represents the...
Embodiment 2
[0106]This embodiment simulates the conclusion of embodiment 1 with the data of a certain controlled system, and the specific process is as follows:
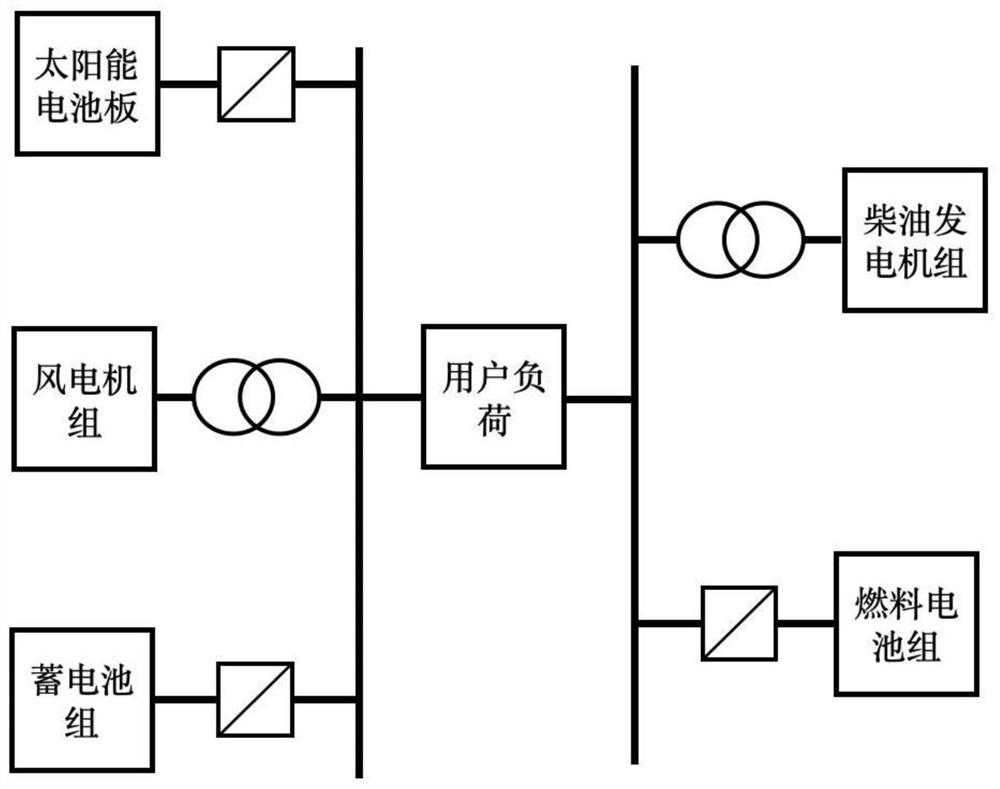
[0107] The structure of a microgrid system containing diesel generators is as follows: image 3 As shown, the load frequency is modeled; the system can adopt the state space differential equation of a controlled system with disturbance as Describe, specifically:
[0108] x(t) T =[Δf(t)Δδ(t)ΔP WTG (t)ΔP PV (t)ΔP DEG (t)ΔP FC (t)ΔP BES (t)ΔP g (t)];
[0109] w(t) T =[ΔP Wind (t)ΔP Solar (t)ΔP Load (t)];
[0110]
[0111]
[0112]
[0113]
[0114]
[0115] The simulation parameters are D=0.012; M=0.2; R=2.4; T BES =0.1; T Fc =0.1; T PV =1.8; T WTG = 1.5; T DEG = 2;
[0116] The iterative optimization process curve is as follows Figure 4 Shown, the mixed H obtained according to the optimization of Example 1 2 / H ∞ The optimal control feedback gain matrix K of the robust controller is:
[0117...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com