

Ground robot positioning method based on multiple sensors
A robot positioning and multi-sensor technology, applied in the field of intelligent robots, can solve the problems of inability to observe scale information, poor positioning effect of ground robots, and difficulty in accurate observation, achieve accurate track deduction positioning, achieve efficient use, and improve accuracy. and robustness effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0080] The specific implementation of the present invention will be described in detail below with reference to the accompanying drawings, but this embodiment is not intended to limit the present invention, and all similar structures and similar changes of the present invention should be included in the protection scope of the present invention.
[0081] The multi-sensor positioning method, the hardware operation includes: calibrate the diameter of the driving wheel of the robot, and establish the transformation function Tr(x) from the encoder reading increment to the moving distance of the wheel; calibrate the wheel spacing B between the left and right driving wheels of the robot; calibrate the internal parameters of the camera and External reference; external reference for calibrating the IMU; time stamp alignment is required for multiple sensors.
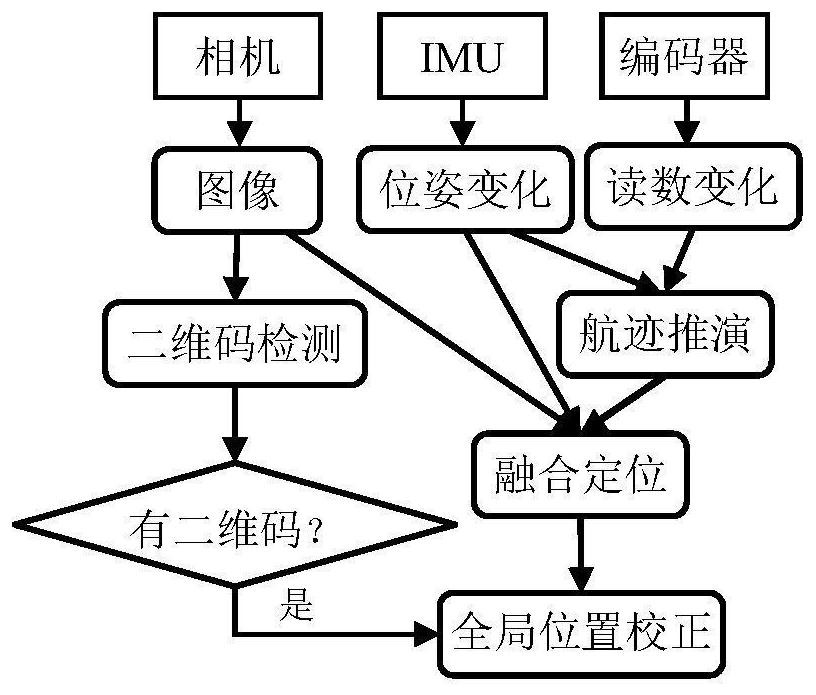
[0082] figure 1 The composition and processing flow of the multi-sensor positioning system are shown. The main steps are:
[...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More