

Automatic operation control method and control system of punching and digging machine
A control method and punching technology, applied in electric controllers, controllers with specific characteristics, sheet pile walls, etc., can solve the problems of high quality requirements of operators, high labor costs, and increased labor costs, and reduce labor The effect of training cost and work intensity, improving brand competitiveness, and improving the degree of intelligence
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Benefits of technology
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0057] The following is a detailed description of the embodiments of the present invention: this embodiment is implemented on the premise of the technical solution of the present invention, and provides detailed implementation methods and specific operation processes. It should be noted that those skilled in the art can make several modifications and improvements without departing from the concept of the present invention, and these all belong to the protection scope of the present invention.
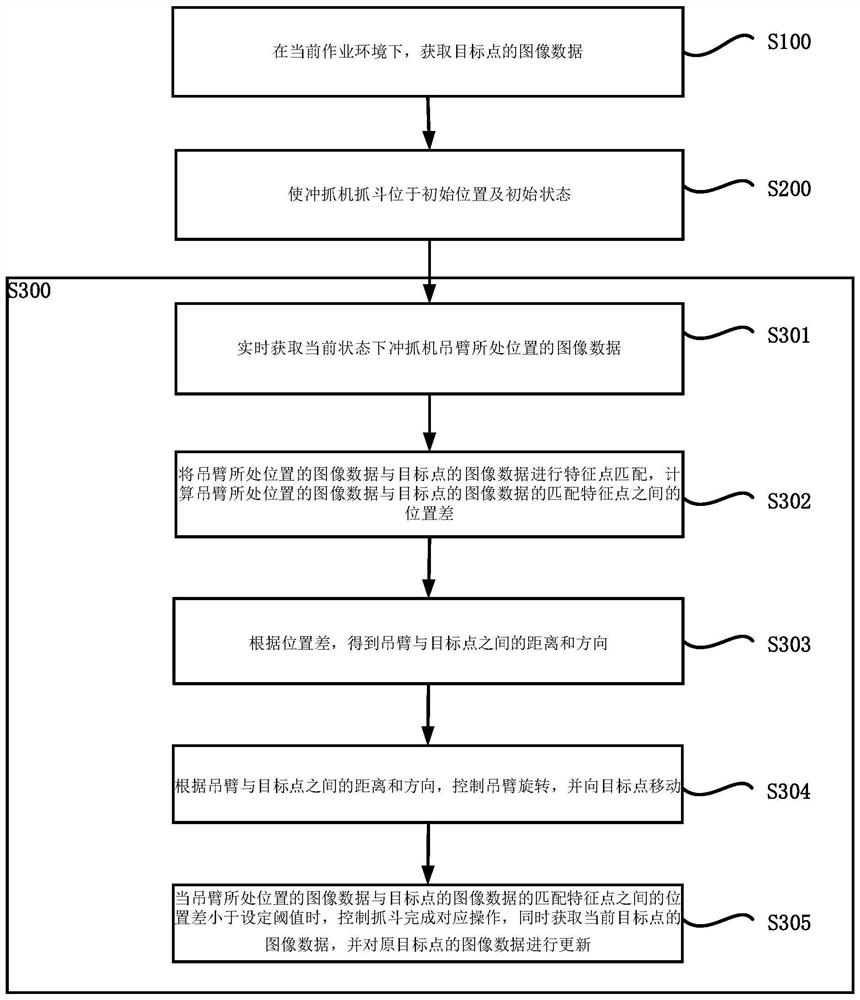
[0058] figure 1 It is a flow chart of the automatic operation control method of the punching and grabbing machine provided by an embodiment of the present invention.
[0059] like figure 1 As shown, the automatic operation control method of the punching and grabbing machine provided in this embodiment may include the following steps:
[0060] S100, under the current working environment, acquire the image data of the target point;
[0061] S200, making the grab bucket of the punching ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More