Ship navigation signal lamp inspection method based on unmanned aerial vehicle
An inspection method and signal light technology, which are applied in the field of UAV-based ship navigation signal light inspection, can solve the problems that the inspection results cannot be qualified at one time, the ship trial period is unfavorable, and the coordinate points cannot be confirmed, so as to shorten the trial period and save labor. Cost and tugboat fuel consumption, etc., and the effect of improving inspection safety
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0022] The present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments.
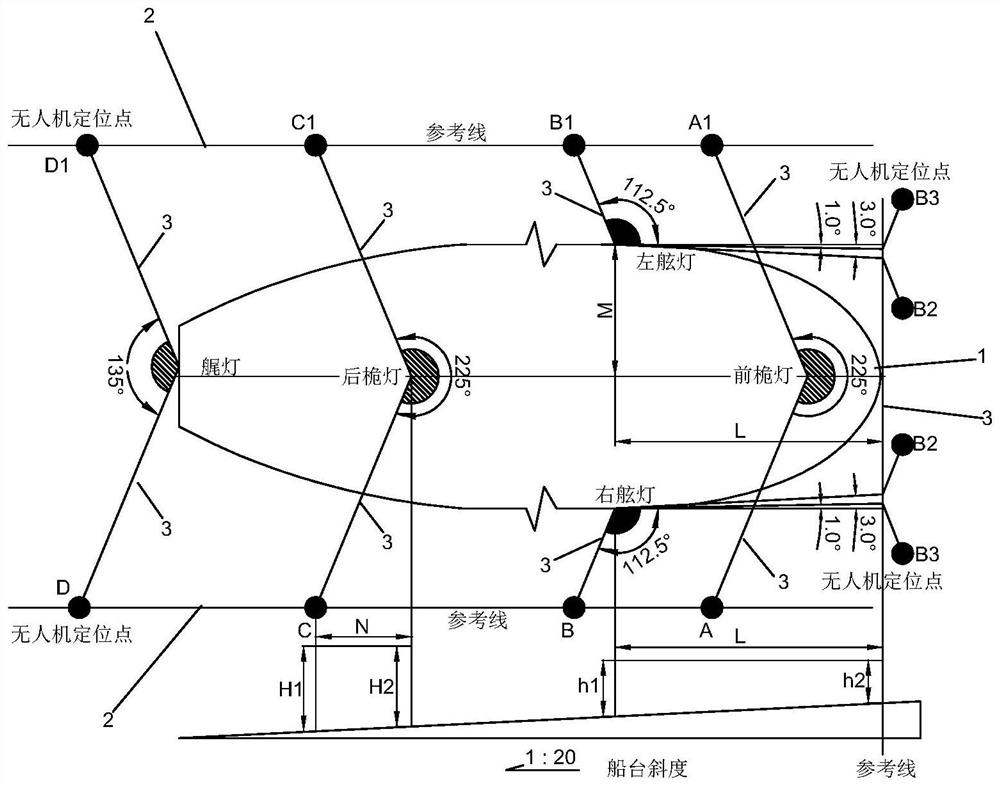
[0023] Such as figure 1 As shown, a method for inspection of ship navigation signal lights based on unmanned aerial vehicles, using unmanned aerial vehicles to inspect ship navigation signal lights, specifically includes the following steps:
[0024] 1) The specific position of the ship under construction, the horizontal dock or the inclined berth 1, draw the reference line 2 on both sides of the ship, and draw the angle line 3 of the navigation signal light according to the angle of the navigation signal light, where the angle line of the navigation signal light in the horizontal dock is different from the reference line Height difference, if the berth is inclined, the height difference of the intersection point needs to be calculated according to the slope of the berth;
[0025] Reference line 1 is based on the centerline of the hull, defin...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More