

High-precision control method for three-axis inertially stabilized platform based on internal model principle and self-adaptive time-varying bandwidth observer
A technology based on time-varying bandwidth and internal model principle, applied in adaptive control, general control system, control/regulation system, etc., can solve the problem that control performance is easily affected by external interference, and achieve fast response of observation performance and dynamic parameters , the effect of avoiding the chattering phenomenon
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
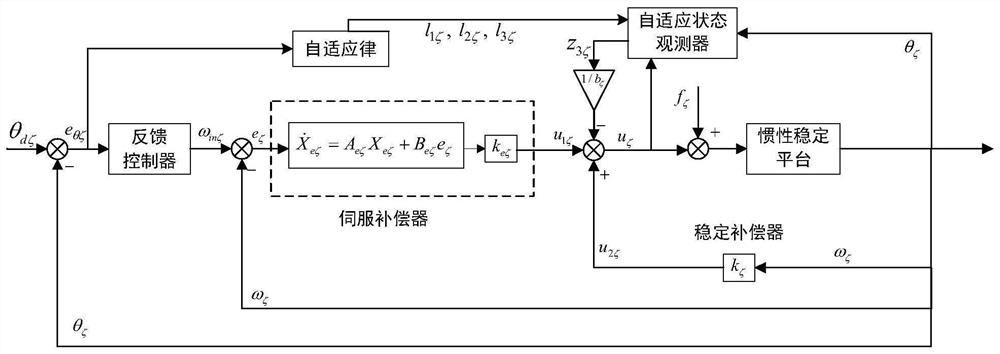
[0032] Such as figure 1 Shown, the concrete realization of the present invention is as follows
[0033] (1) Construction of servo compensator and stable compensator based on internal model principle
[0034] The standard model of the angular velocity system of the three-axis inertial stabilized platform is expressed as:
[0035]
[0036] Among them, when ζ = r, it means the roll channel, when ζ = p, it means the pitch channel, when ζ = a, it means the heading channel, x ζ is the state variable of the ζ-axis angular velocity system, y ζ is the output of the ζ-axis angular velocity system, x ζ =y ζ = ω ζ is the actual angular velocity of the ζ axis, u ζ is the ζ-axis control voltage, f ζ is the system ζ-axis lumped disturbance, and its first derivative f ζ Bounded, A ζ =[0],B ζ =[b ζ] is the ζ-axis motor control coefficient, C ζ =[1],D ζ =[0],E ζ =[b fζ ] is the ζ-axis interference coefficient, F ζ =[0];
[0037] Design a servo compensator and a stable compen...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More