

Cellular cluster multi-rotor unmanned aerial vehicle structure and control method thereof
A technology of multi-rotor UAV and control method, which is applied in the field of honeycomb cluster multi-rotor UAV structure and its control, can solve problems such as increased transportation and storage costs, GPS positioning system failure, motor propeller damage, etc., to reduce Transportation and storage costs, reduced transportation costs, and the effect of ensuring stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment approach
[0053] Assume that the take-off weight of the honeycomb UAV is 1kg, the effective load weight is 1kg, and the regular flight time is 20 minutes.
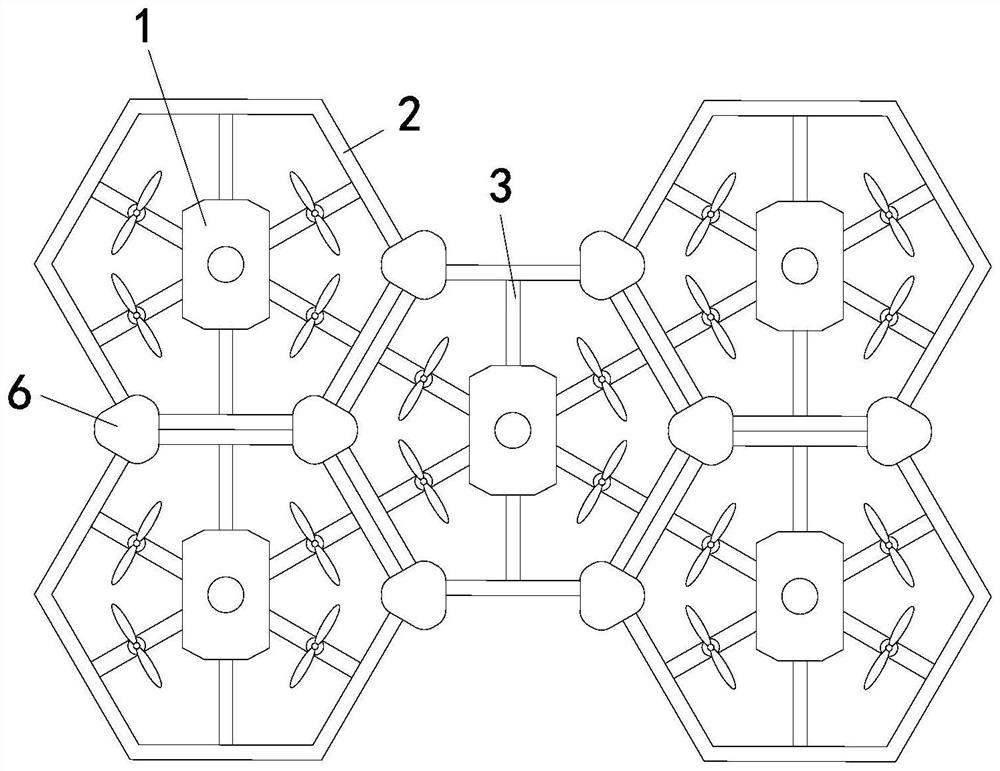
[0054] Determine the flight mode of the UAV: for example, the weight of the task vehicle is 2kg, and the flight time is 10 minutes. In order to meet the weight requirements of the mission vehicle, the honeycomb hexacopter mode is selected. This mode consists of 7 honeycomb UAVs to form a six-rotor mode, one of which is the master and 6 are adjacent slaves. The theoretical loading weight can reach 7kg, which already meets the weight of the task vehicle.
[0055] Power redundancy setting: Assuming that one of the slaves loses power in the six-rotor mode, in order to maintain the flight stability of the honeycomb cluster, the slave on the opposite corner of the lost power will also suspend power output. At this time, the remaining 5 UAVs individually output power, the effective load is reduced to 5kg, and the overall mounted weight ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More