

Hybrid-driven anchor chain cleaning and detecting robot and operation method thereof
A hybrid drive, robot technology, applied in the direction of using liquid cleaning methods, cleaning methods and utensils, chemical instruments and methods, etc., to achieve the effect of facilitating maintenance and improving work efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
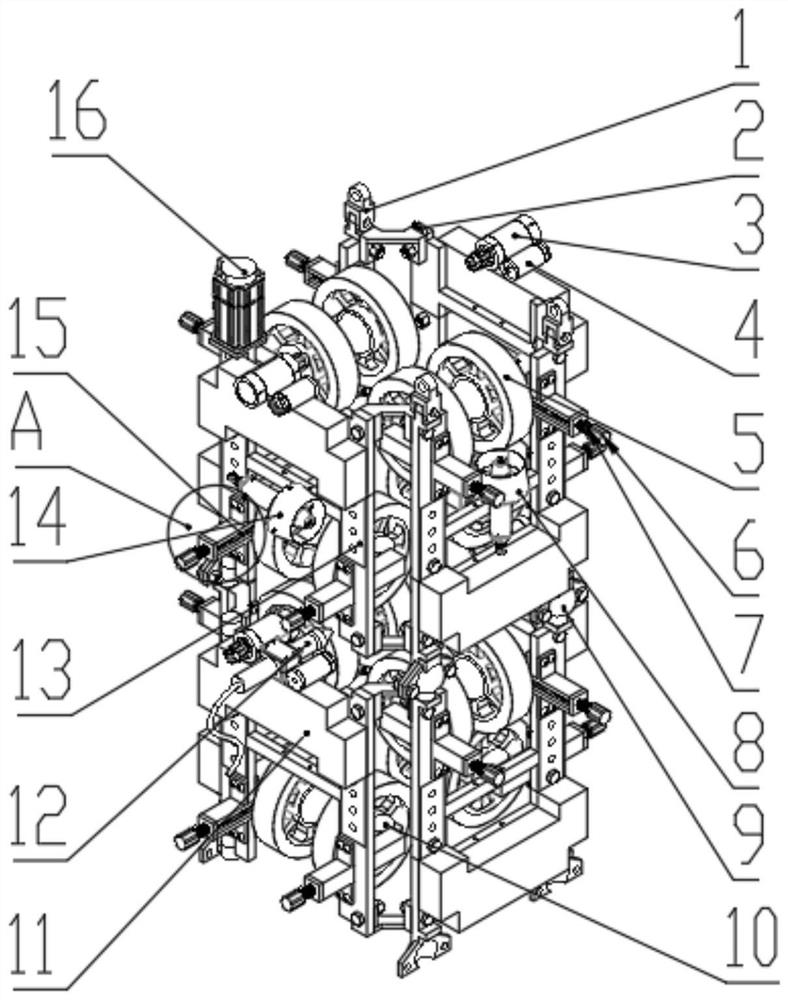
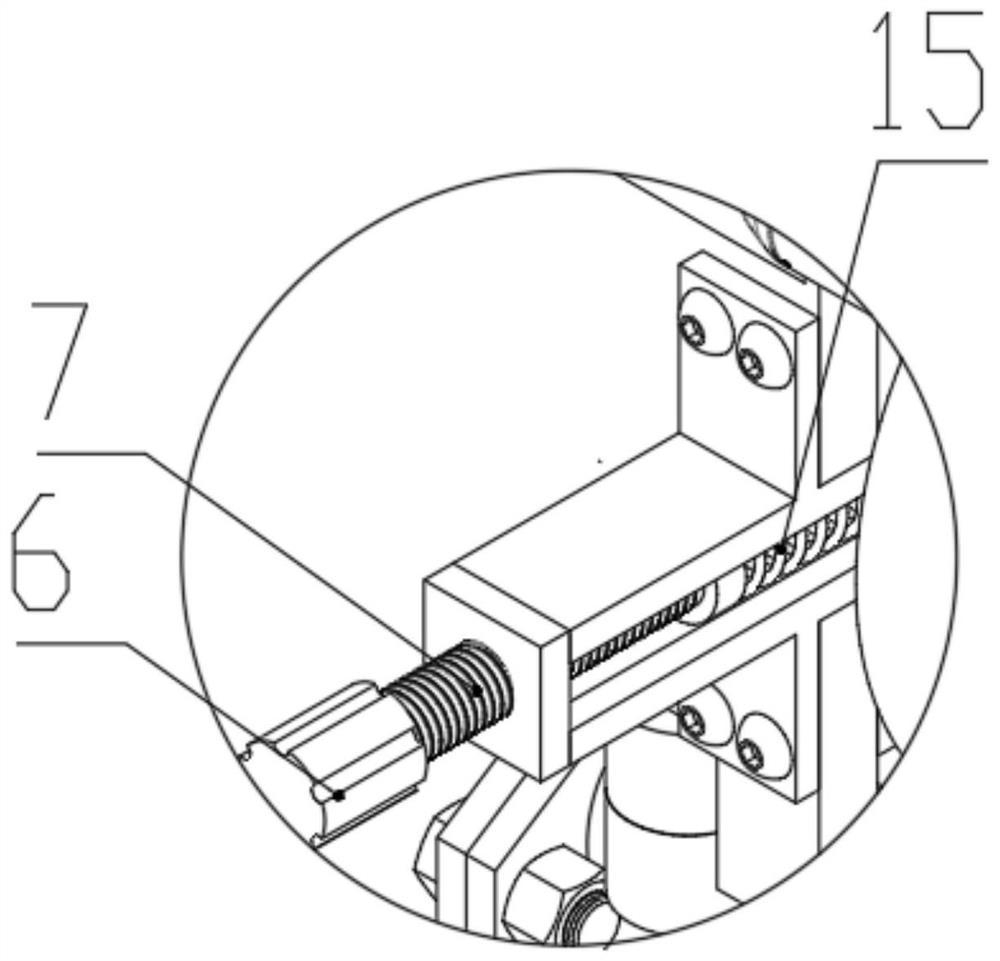
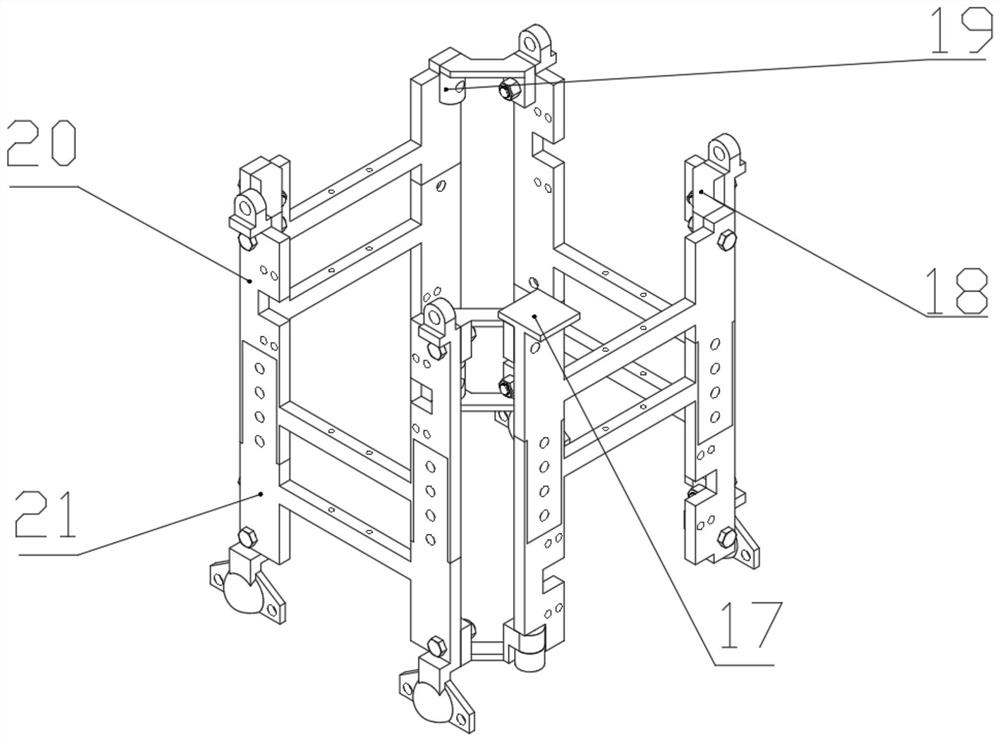
[0041] see Figure 1 to Figure 4 , in Embodiment 1 of the present invention, a structural diagram of a hybrid-driven anchor chain cleaning and detection robot provided by the embodiment of the present invention includes: no less than one frame structure; a buoyancy system arranged on the frame structure for Adjust the buoyancy of the robot; the drive system is arranged on the frame structure; the drive system includes a propeller propulsion drive system and a wheel drive system; the propeller propulsion drive system is used to provide power for underwater movement; the wheel drive system is used It is used to drive the robot to move on the anchor chain; the underwater observation system is set on the frame structure to observe underwater; the cleaning system is set on the frame structure to clean the anchor chain; The system is set on the frame mechanism; and the detection system is set on the frame structure.
[0042] The frame structure is the main structure for carrying va...
Embodiment 2
[0059] The embodiment of the present invention also provides a hybrid driving anchor chain cleaning and detection robot operation method, including the following steps:
[0060] (1) Gently put the robot to a position near the mooring chain, and the robot is in a tight state at this time;
[0061] Specifically, the hook part of the robot is pulled by the crane on the mother ship, the umbilical cable is connected to the robot through the decoupler, and the robot is lightly placed near the mooring chain. At this time, the robot is in a tight state, which is convenient for the robot to work in the next step;
[0062] (2) After being deployed to a certain distance underwater, the robot is driven by the drive system and freely floats to the vicinity of the anchor chain;
[0063] Specifically, after being deployed to a certain distance underwater, a command is sent to release the decoupling device, and the robot is driven by the propeller propulsion drive system to freely float to th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More