

Hybrid intelligent artificial limb control method and system
A technology of intelligent prosthesis and control method, applied in prosthesis, medical science, artificial legs, etc., can solve the problems of inability to make adaptive adjustments to gait, prosthetic limbs are cumbersome, slow in response, etc., to improve the system's human-computer interaction ability and Highly adaptable, effective and reliable effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0022] The technical solutions of the present invention will be clearly and completely described below in conjunction with the embodiments. Apparently, the described embodiments are only some of the embodiments of the present invention, not all of them. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without creative efforts fall within the protection scope of the present invention.
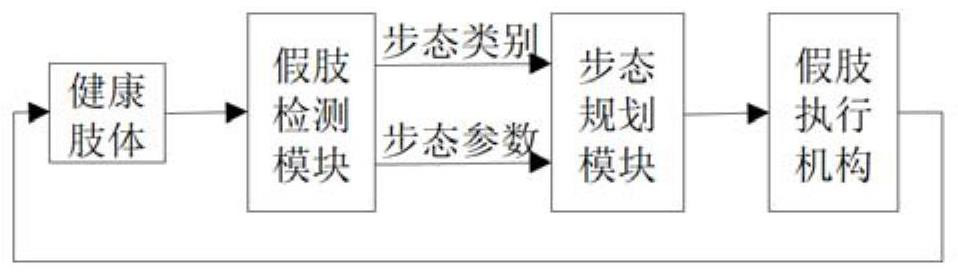
[0023] Such as figure 1 As shown, a hybrid intelligent prosthetic control method includes the following steps:
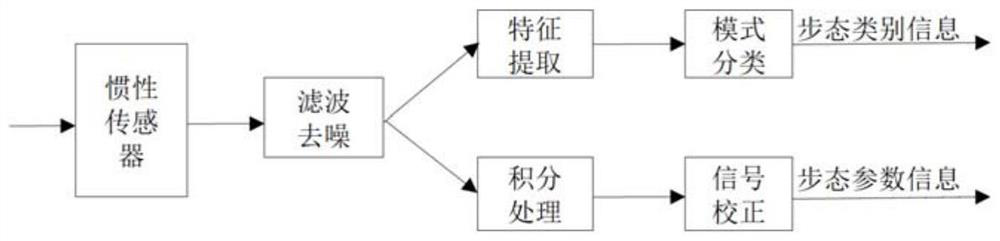
[0024] Step 1: Detect gait information from healthy limbs through the prosthesis detection module, and pass the gait information to the gait planning module;
[0025] Step 2: Generate the prosthetic gait through the gait planning module, and transfer the prosthetic gait to the hybrid drive mechanism;
[0026] Step 3: Drive the prosthetic actuator to move through the hybrid drive mechanism to complete the ground...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More