SLAM (Simultaneous Localization and Mapping) method based on laser radar and rotary inertial navigation integrated framework and information fusion
A lidar and laser technology, used in mapping and navigation, navigation, navigation calculation tools, etc., can solve the problems of low inertial sensor accuracy affecting lidar/inertial SLAM performance, etc., to improve navigation accuracy and reliability, reduce dimensions, The effect of reduced drift
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0021] Below in conjunction with accompanying drawing, technical scheme of the present invention is described in further detail:
[0022] Those skilled in the art can understand that, unless otherwise defined, all terms (including technical terms and scientific terms) used herein have the same meaning as commonly understood by one of ordinary skill in the art to which this invention belongs. It should also be understood that terms such as those defined in commonly used dictionaries should be understood to have a meaning consistent with the meaning in the context of the prior art, and will not be interpreted in an idealized or overly formal sense unless defined as herein Explanation.
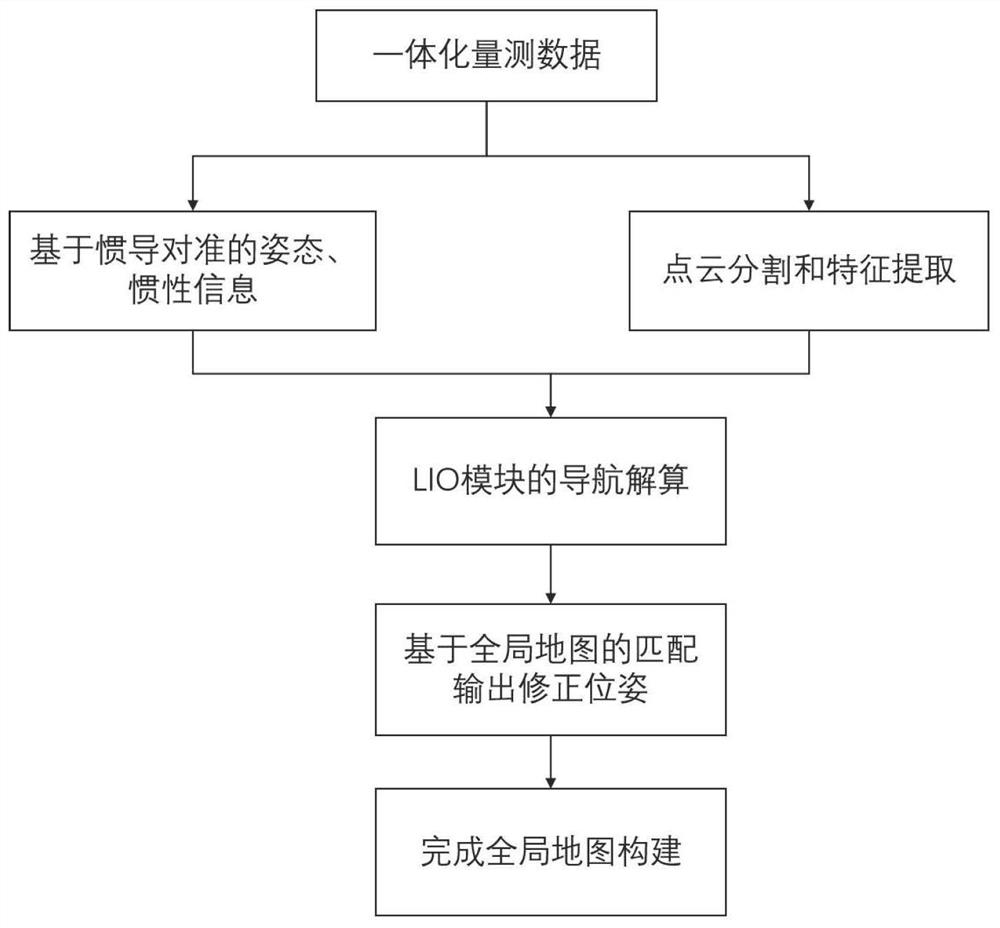
[0023] The present invention proposes a SLAM method for integrated framework and information fusion of laser radar and rotary inertial navigation. System dynamic alignment scheme, a simplified laser inertial odometry (LIO) model.
[0024] Such as figure 1 As shown, the present invention propos...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More