

Obstacle avoidance itinerant method and system of mowing robot
A lawn-mowing robot and lawn-mowing technology, applied in control/adjustment systems, instruments, motor vehicles, etc., can solve the problems of changing the direction of mowing, increasing the amount and cost of embedding lines, leaving traces on the lawn, etc., to achieve smoothness and stability running effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0049] The following will clearly and completely describe the technical solutions in the embodiments of the application with reference to the drawings in the embodiments of the application. Apparently, the described embodiments are only some, not all, embodiments of the application. Based on the embodiments in this application, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the scope of protection of this application.
[0050] Unless otherwise defined, all technical and scientific terms used herein have the same meaning as commonly understood by one of ordinary skill in the technical field to which this application belongs. The terms used herein in the description of the application are only for the purpose of describing specific embodiments, and are not intended to limit the application.
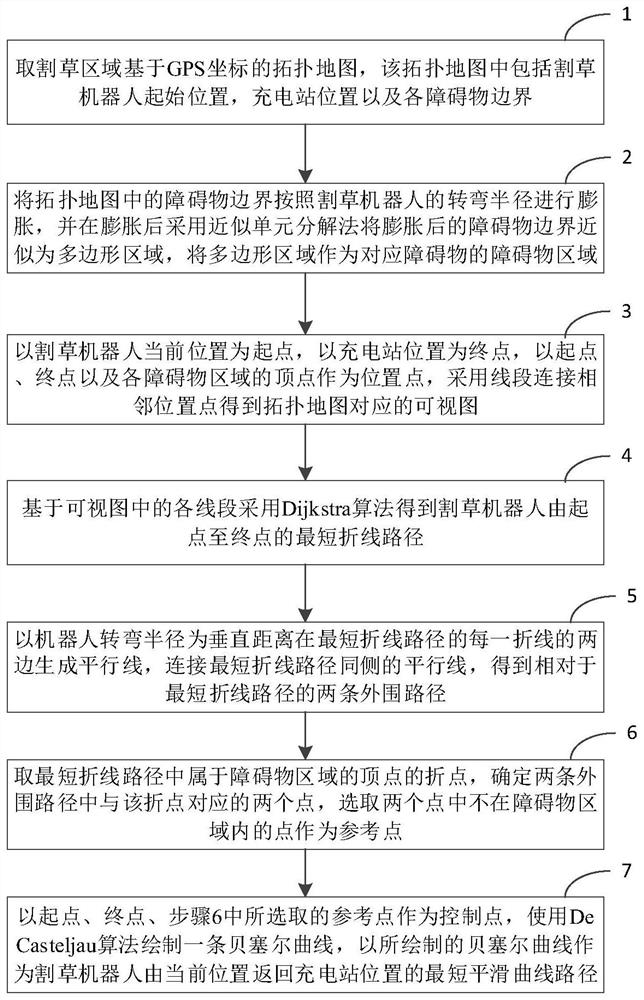
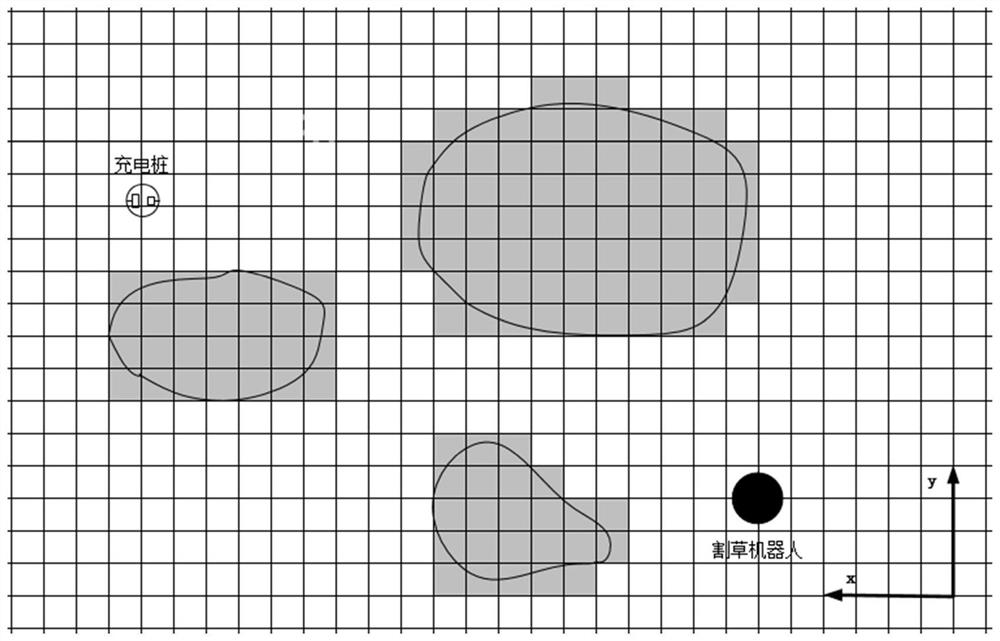
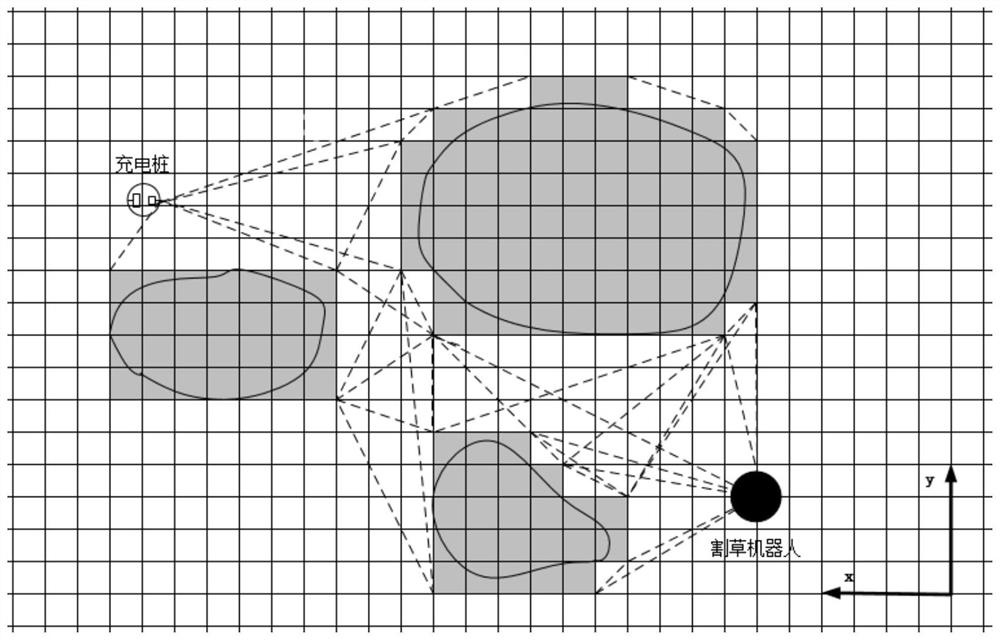
[0051] In one of the embodiments, an obstacle avoidance tour method of a lawn mowing robot is provided, which is used for t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More