

Bionic leg-foot and trunk structure design method based on topological optimization technology
A topology optimization and structural design technology, applied in design optimization/simulation, special data processing applications, instruments, etc., can solve the problems of low carrying capacity and large weight of footed robots, and achieve weight reduction, weight reduction, and stability. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0019] The technical solutions of the present invention will be clearly and completely described below in conjunction with specific embodiments, but those skilled in the art should understand that the embodiments described below are only for illustrating the present invention, and should not be regarded as limiting the scope of the present invention. Based on the implementations in the present invention, all other implementations obtained by those skilled in the art without creative efforts fall within the protection scope of the present invention.
[0020] Embodiments of the bionic leg, foot and torso structure design method based on topology optimization technology of the present invention:
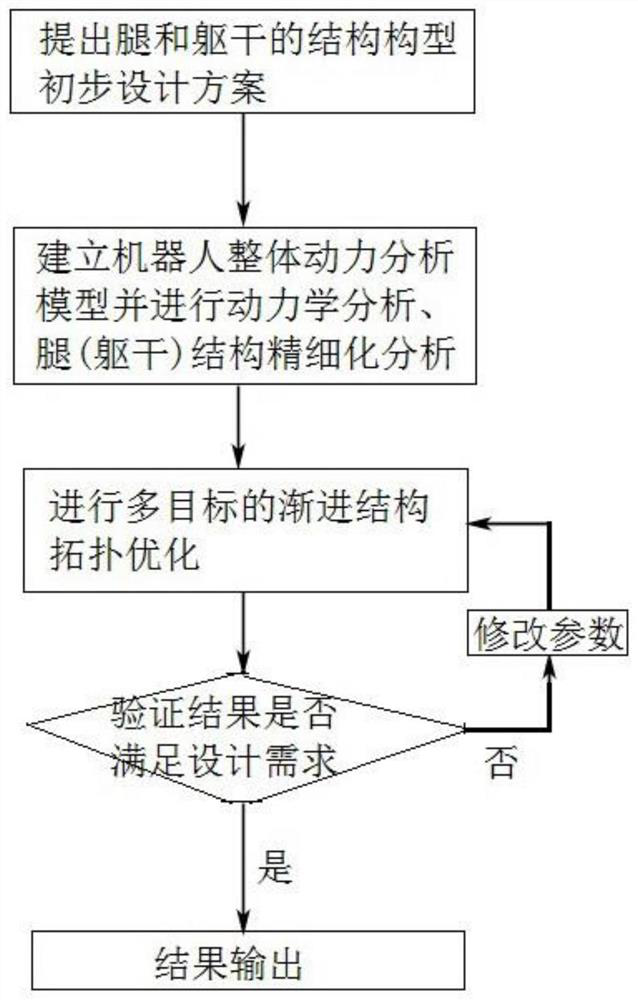
[0021] The bionic leg, foot and torso structure design method based on topology optimization technology of the present invention comprises the following steps:
[0022] In the first step, the leg structure and the torso structure are divided into modules to form a leg structure resource...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More