

Data-driven multi-agent system PID control protocol self-learning method
A technology of multi-agent system and self-learning method, which is applied to electric controllers, controllers with specific characteristics, etc., to achieve the effect of ensuring performance optimization and ensuring optimality
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0198] Multi-agent system matrix:
[0199]
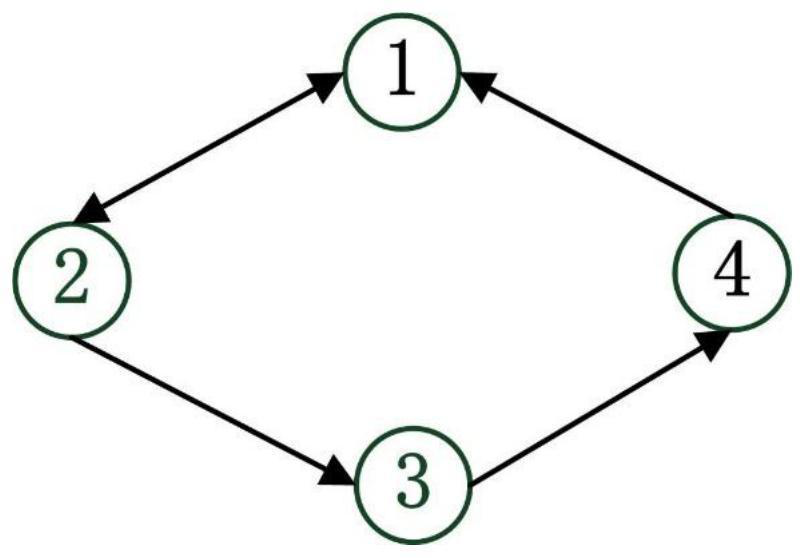
[0200] figure 1 As shown, given the communication topology diagram, the multi-agent edge weight is:
[0201] e 12 =0.8,e 14 =0.7,e 21 =0.8,e 31 =0.8,e 32 =0.5,e 43 = 0.8.
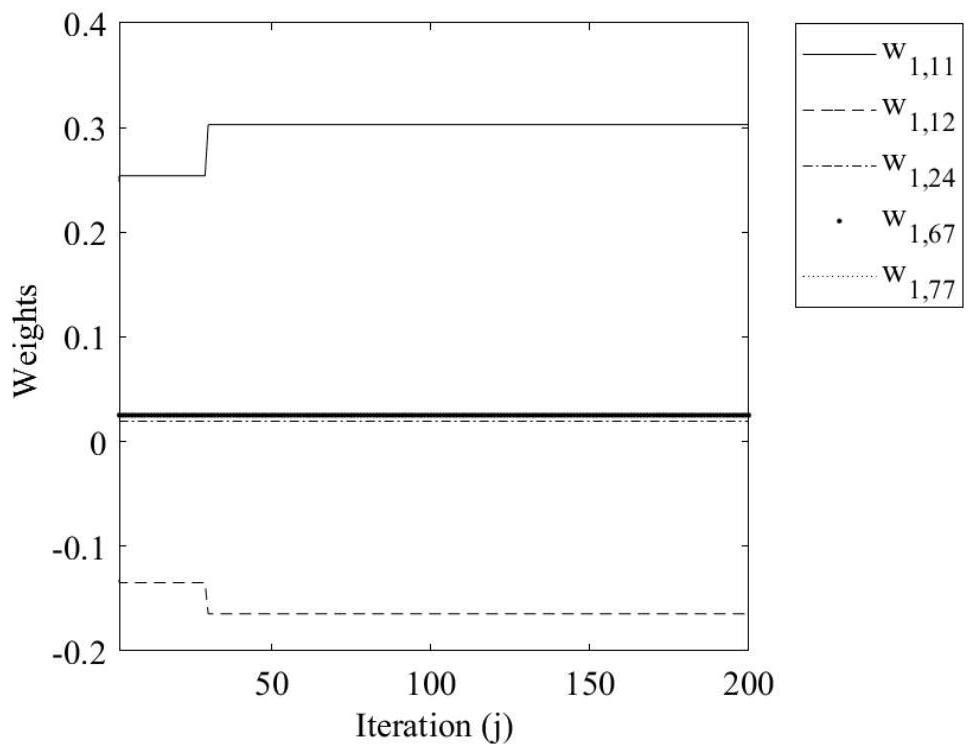
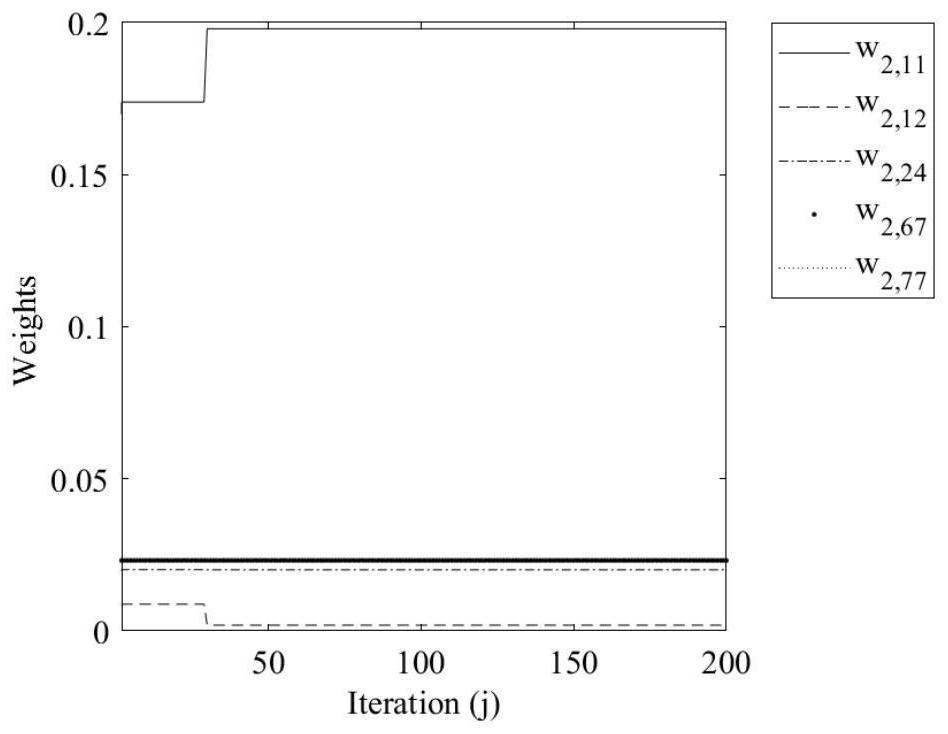
[0202] Figure 2-9 The evolution of the critic neural network weights for four agents is shown. Once the critic neural network weights are found, the PID and PI control parameters can be calculated. It can be found that under the learned PID control protocol, all agents have reached an agreement, such as Figure 10 and Figure 12 is shown in , where the neighbor error states and the state at which all agents reach the optimal consensus are plotted.
[0203] To demonstrate that the control performance achieved under the PID consistent control protocol may be better than state feedback control or proportional-integral (PI) control, and to demonstrate the generality of the developed model-free PID consistent control method, we contrast PI with PID.
...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More