Method for recognizing sweet peppers and determining picking sequence based on multi-view three-dimensional reconstruction
A technology of three-dimensional reconstruction and determination method, applied in three-dimensional object recognition, character and pattern recognition, 3D modeling and other directions, can solve the problem that the image RGB is easily affected by light, the recognition effect depends, and the grasping point cannot be accurately obtained. , to achieve the effect of improving the success rate of picking and reducing the rate of fruit damage
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
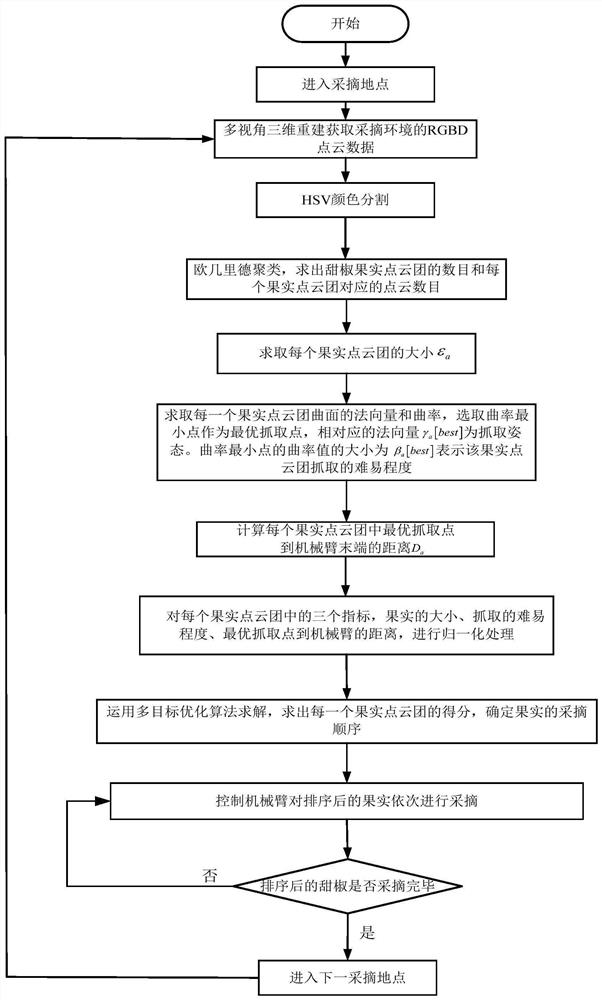
[0016] A method for identifying sweet peppers and determining the order of picking based on multi-view three-dimensional reconstruction, comprising the following steps:
[0017] Step 1. Equipment construction and coordinate system establishment
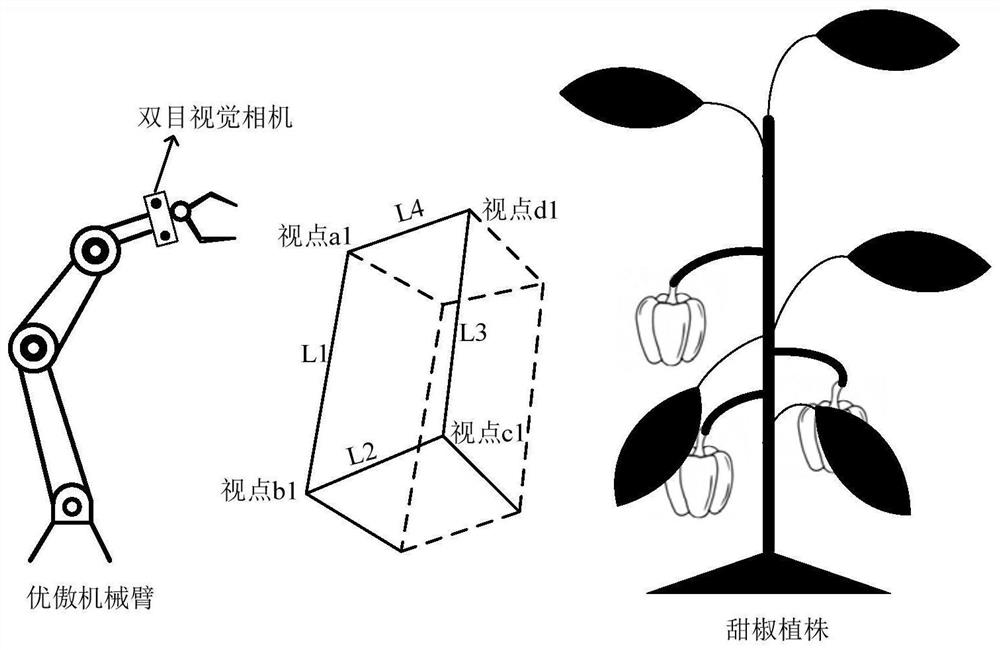
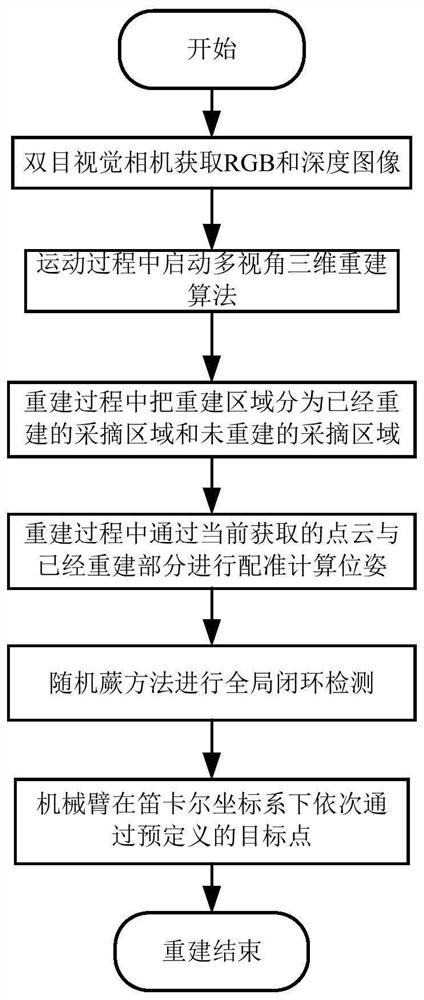
[0018] Install the binocular vision camera on the end effector of the six-degree-of-freedom Universal Robot manipulator. Start the binocular vision camera and the 6-DOF UR robot arm, and load the URDF model of the robot arm and camera, which describes the position and posture of each joint of the robot arm and the transformation relationship with the camera coordinate position. Define the base coordinate system of the robotic arm as base_link, the coordinate system of the camera as camera_frame, and the coordinate system of the end effector as tool0. Use translation and rotation to determine the positional relationship between the camera coordinate system and the base coordinates of the robotic arm.
[0019] Formula (1) expresses the...
PUM
| Property | Measurement | Unit |
|---|---|---|
| Length | aaaaa | aaaaa |
| Width | aaaaa | aaaaa |
Abstract
Description
Claims
Application Information
 Login to View More
Login to View More 
PatSnap Eureka turns technology decisions into work you can execute. Powered by our Innovation Knowledge Graph, it runs expert workflows across engineering, life sciences, materials and intellectual property. Get your review-ready output in minutes.



